K(s)=D(s)×кукд КЭКО(s),
K(z)=D(z)×![]() {кукдКЭКО(s)}.
Здесь к у к д К Э(s)K0(s) –
произведение четырех ПФ: усилителя, датчика, экстраполятора и объекта.
{кукдКЭКО(s)}.
Здесь к у к д К Э(s)K0(s) –
произведение четырех ПФ: усилителя, датчика, экстраполятора и объекта.
______________________________________________________________________________
*)Термины "разно размерная передаточная функция" (РРПФ), "блок разно размерных преобразований" (БРП) введены нами для удобства, без проверки лингвистической достоверности (С.К.)
Причем, без большой погрешности, мы упростили задачу, считая усилитель мощности и датчик безинерционными линейными звеньями.
Что делать с этим выражением (5. 13)? Анализируя величину его числителя и знаменателя, рассмотрим состав ПФ K(s) и ДПФ K(z), а затем перейдем к оценкам их модулей в частотой и псевдочастотной областях, соответственно.
Как
мы помним, в низкочастотной области функции частоты и псевдочастоты близки и,
практически, совпадают. На этом основании можно считать, что при низких частотах
Δcис(![]() )
)![]() ≈1.
≈1.
С
другой стороны, в высокочастотной области К(jω) и К(jλ) вообще малы по
абсолютной величине (поскольку мы рассматриваем устойчивую систему) – малы по
сравнению с единицей, входящей первым слагаемым в числитель и знаменатель. Поэтому
здесь также Δcис(![]() )≈1.
)≈1.
Вообще говоря, остается тонкий вопрос – а близко ли значение ΔСИС(s,z) к единице в области границы частот, при λ=2/Т (ω=ωK/4). При практических исследованиях можно просто вычислять значения модуля и фазы ΔСИС(jωK/4, 2/T) в этой точке и вводить поправку. Итак, со вторым множителем, входящим в состав K(s,z) мы, в целом, разобрались.
Теперь рассмотрим первый сомножитель. По сути, он является отношением аналогового и цифрового сигналов управления (мы, как обычно, рассматриваем единичные входные сигналы).
![]()
Примечание Р.Горковенко. Для соблюдения размерности нам следует перейти к безразмерному аргументу ‾t (тэ-надчеркнутое). Между прочим, откуда появился период квантования Т в формуле для G(s), – я, к своему стыду" не уследил?
Ответ С. Ковчина. Спасибо, Родион! Как всегда Вы поднимаете, "к стати", важный вопрос. Профану - то "до лампочки". У него всегда "машина" (программа) виновата в том, что модель того же двигателя с тем же ПИ регулятором, реализованным в аналоговом виде и программно "выдает "разные переходные процессы, различающиеся в тысячи и более раз!
Преобразования "Z" и w"оперируют с"безразмерным временем" "n", а преобразование Лапласа "s" связано с реальным временем "t". Я пришел к пониманию этого, пожалуй, через пару месяцев "проб и ошибок" при оценке погрешностей преобразования информации в ДСАУ и САУ. Ведь в литературе этого нет! Точнее, "корифеи", которые пишут умные монографии считают, что это "и маленькому ёжику должно быть понятно". Мне же, порой кажется , что многие практически важные вопросы им "и в голову не приходят". Поэтому мы, инженеры - прикладники, к пониманию неадекватного поведения наших аналоговых и цифровых моделей реальных систем вынуждены доходить сами.
Далее:
![]() .
.
Поэтому можно записать, что
![]() .
(6. 13)
.
(6. 13)
Выражение
(6. 13) позволяет точно вычислить функцию![]() , учитывая, что есть
однозначная связь: ω=2arctg(λT/2)/T.
, учитывая, что есть
однозначная связь: ω=2arctg(λT/2)/T.
Поэтому
выходит для комплексно - значной функции![]() ,:
,:
![]() – фазочастотная
характеристика; (71. 13)
– фазочастотная
характеристика; (71. 13)
 амплитудо - частотная
характеристика. (7!!. 13)
амплитудо - частотная
характеристика. (7!!. 13)
![]()
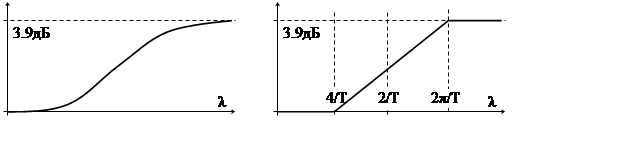 |
Теперь мы можем позволить себе удовольствие иметь передаточную функцию нашего звена в виде
|K(λ)|=(1+Tλ/4)/(1+Tλ/2π).
Здесь прилагается полезная таблица 1:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.