Системы подчиненного управления (регулирования)
Альтернативным методу динамического синтеза систем автоматического управления может служить синтез систем по подчиненному принципу (синтез систем подчиненного управления).
К системам подобного типа относятся такие многоконтурные системы автоматического управления, каждый из контуров которых как бы вложен один в другой. Причем любой внутренний контур управляется выходным сигналом регулятора соответствующего внешнего контура. Обычно каждый отдельный контур предназначен для регулирования одной из координат системы.
Системы подчиненного управления (СПУ) - частный случай систем с последовательной коррекцией. В англо - язычной литературе регуляторы, построенные по этому принципу, называют "каскадными".
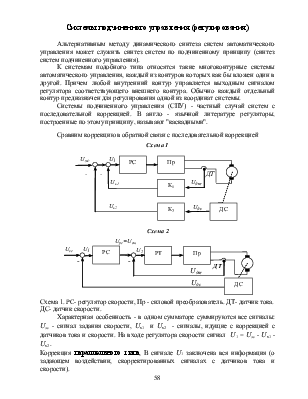
Сравним коррекцию в обратной связи с последовательной коррекцией
Схема 1. PC- регулятор скорости, Пр - силовой преобразователь. ДТ- датчик тока. ДС- датчик скорости.
Характерная особенность - в одном сумматоре суммируются все сигналы: Uзс - сигнал задания скорости, Uк1 и Uк2 - сигналы, идущие с коррекцией с датчиков тока и скорости. На входе регулятора скорости сигнал U1 = Uзс - Uк1 - Uк2.
Коррекция параллельного типа. В сигнале U1 заключена вся информация (о задающем воздействии, скорректированных сигналах с датчиков тока и скорости).
Схема 2. На входе каждого регулятора имеет место суммирование только двух сигналов: U1 = Uзс - Uдс, U2 = Uзт - Uдт,
Uзс- задание на скорость, Uзт - задание на ток.
Коррекция последовательного типа. Каждый регулятор работает только на свой контур (управляет своей координатой).
Сравнительные характеристики параллельной и последовательной коррекций:
|
Показатель |
Схема 1 (параллельная коррекция) |
Схема 2 (последовательная коррекция) |
|
Стабильность характеристик |
Выше: Достигается за счет собственно структуры |
Ниже: Достигается за счет качественных силовых преобразователей и качественных операционных усилителей |
|
Помехоустойчивость |
Выше |
Ниже |
|
Трудоемкость расчета регуляторов |
Есть |
Нет |
|
Трудности наладки |
Есть |
Нет |
|
Переналадка |
Трудная |
Легкая |
|
Ограничение выходных координат |
Трудное Обеспечивается введением устройства регулируемых "отсечек" |
Легкое Обеспечивается простым ограничением входного сигнала регулятора |
|
Комплектность (блочность) |
Ниже |
Выше |
Схема 2 обладает существенными преимуществами и лежит в основе систем подчиненного управления.
Системы подчиненного управления впервые появились для регулирования приводов в металлургии.
К причинам, повлекшим их создание, можно отнести следующие:
1. Появление качественных силовых преобразователей и стабильных операционных усилителей с коэффициентом усиления в разомкнутом состоянии 1000000 и более.
2. Требование высоких динамических свойств (высокой производительности) систем автоматического управления.
Основоположник систем подчиненного управления - немецкий ученый К. Кесслер (Kessler C). Им были разработаны системы с настройками на модульный и симметричный оптимумы (1954,55 - 1960гг.).
Главным достоинством СПУ в те и последующие годы считалось наличие "типовых" структур и "типовых" настроек их регуляторов. Они позволяли проектировщикам в новых разработках электроприводов не рассчитывать их динамику, а только "масштабировать" типовые динамические характеристики СПУ".
Основной причиной "популярности" типовых настроек СПУ в течение нескольких десятилетий являлась вычислительная сложность построения переходных процессов систем, модели которых представлялись дифференциальными уравнениями высокого порядка. Сегодня имеет смысл иначе взглянуть на эти старые рекомендации.
Обобщенная структурная схема системы подчиненного управления
 Wрi(s)- i-й регулятор, Wоi(s)-
i-й объект
регулирования. Имеем систему подчиненного управления с n контурами.
Wрi(s)- i-й регулятор, Wоi(s)-
i-й объект
регулирования. Имеем систему подчиненного управления с n контурами.
Общий принцип
построения систем подчиненного управления заключается в следующем: объект О с
передаточной функцией Wо(s)
(если это реализуемо) разделяется структурно на n
частей, так что ![]() .
.
Передаточная функция каждого маленького подобъекта Wоi(s) имеет выходом одну из координат объекта: yi. И по каждой из этих координат образуется i-й контур регулирования. В этот контур входит регулятор с передаточной функцией Wрi(s). Причем в объект i-го контура входит замкнутый (i-1)-й контур и собственно объект i-го контура с передаточной функцией Wоi(s).
Тогда
передаточные функции разомкнутого и замкнутого i-го контура равны ![]() и
и  соответственно.
соответственно.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.