6.3.2. Динамическая регуляторная характеристика двигателя
Форма нелинейности регуляторной характеристики такова, что недоиспользование мощности имеет место всегда при действии на двигатель переменного момента сопротивления.
С повышением нагрузки недоиспользование мощности начинается, когда максимальный крутящий момент (Мк+∆МК)периодически превышает номинальное значение и работа двигателя соответственно переходит с регуляторного на корректорный участок характеристики. При неизменной амплитуде колебаний нагрузки ∆МК и повышении среднего уровня загрузки двигателя Мк до номинального недоиспользование мощности двигателя увеличивается. При постоянной средней загрузке двигателя и увеличении амплитуды ее колебаний недоиспользование мощности также увеличивается.
Принятая гипотеза снижения
мощности двигателя позволяет рассчитать динамическую регуляторную характеристику
двигателя по известной статической регуляторной характеристике,
аппроксимированной с учетом рассмотренного метода. Далее задают, последовательно
увеличивая (уменьшая) несколько средних значений переменного момента
сопротивления (крутящего момента двигателя), начиная с такого, при котором его
наибольшее (наименьшее) значение (![]() ±ΔМс) достигает
точки номинального режима, характеризуемого стыком корректорного и
регуляторного участков характеристики. На рисунке 6.5 — это тт. М1, M2, М3, М4 и М5. Вначале выполняют расчет и построение
для варианта статического воздействия на двигатель. На оси абсцисс можно найти
угловую скорость вала, соответствующую каждому из принятых значений момента,
если опустить перпендикуляр на ось абсцисс из тт. а, b, с, d и e на графике статической
характеристики (это построение не выполнено, чтобы не затемнять рисунок.).
Далее по рассмотренному выше алгоритму определяют средние значения
±ΔМс) достигает
точки номинального режима, характеризуемого стыком корректорного и
регуляторного участков характеристики. На рисунке 6.5 — это тт. М1, M2, М3, М4 и М5. Вначале выполняют расчет и построение
для варианта статического воздействия на двигатель. На оси абсцисс можно найти
угловую скорость вала, соответствующую каждому из принятых значений момента,
если опустить перпендикуляр на ось абсцисс из тт. а, b, с, d и e на графике статической
характеристики (это построение не выполнено, чтобы не затемнять рисунок.).
Далее по рассмотренному выше алгоритму определяют средние значения ![]() с учетом переменного характера установленных
моментов
с учетом переменного характера установленных
моментов ![]() . На линиях М1-а, М2-b, М3-с,
M4-d и М5-е
обозначают точки, соответствующие
. На линиях М1-а, М2-b, М3-с,
M4-d и М5-е
обозначают точки, соответствующие ![]() ,
, ![]() ,
, ![]() ,
, ![]() и
и ![]() , аналогичные т. е' на рисунке 6.4. Это
будут тт. b1, c1 и d1. Соединив их между собой и с тт. а и е, получают
теоретическую динамическую регуляторную характеристику двигателя.
, аналогичные т. е' на рисунке 6.4. Это
будут тт. b1, c1 и d1. Соединив их между собой и с тт. а и е, получают
теоретическую динамическую регуляторную характеристику двигателя.
В общем случае корректорный участок регуляторной характеристики возле точки стыка с регуляторным участком носит нелинейный характер. Это также необходимо учитывать при определении "расслоения" регуляторной характеристики. Нелинейность корректорного участка осложняет аппроксимацию детерминированной функциональной зависимости ωд=f(Мк), описывающую статическую регуляторную характеристику.
Используются различные способы аппроксимации корректорного участка: в виде полиномов различной степени; линейной зависимостью; линейной зависимостью с гиперболическим участком и др.
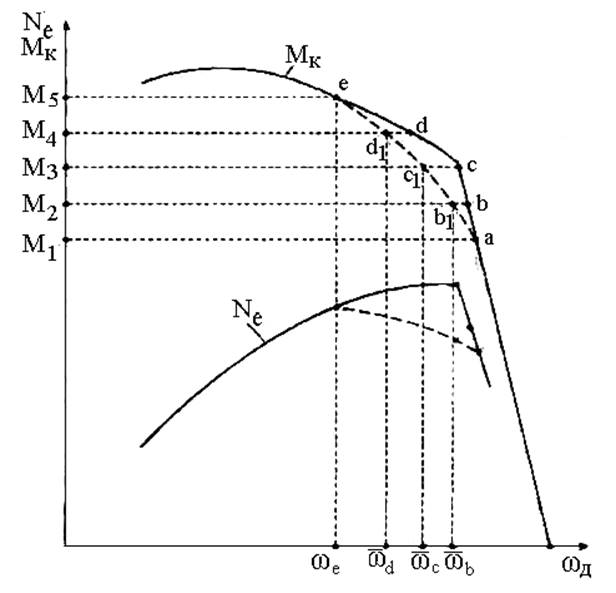
Рисунок 6.5 - Статическая (—) и динамическая (– – –) регуляторные характеристики двигателя
Наиболее просты и достаточно точны линейная и кусочно-линейная аппроксимации. Реализацию корректорного участка регуляторной характеристики конкретного двигателя получают по результатам его стендовых испытаний или путем расчета по известным зависимостям из теории ДВС.
Следует отметить, что регуляторная характеристика топливного наcoca высокого давления, отражающая зависимость цикловой подачи от угловой скорости кулачкового вала qц=f(ωд), не отличается по форме от характеристики Мк=f(ωд). Посредством жесткой кинематической связи колебания угловой скорости коленчатого вала двигателя передаются кулачковому валу топливного насоса, что вызывает изменение регуляторной характеристики qц=f(ωд), аналогичное изменению регуляторной характеристики двигателя. Динамическая регуляторная характеристика топливного насоса отражает снижение среднего значения цикловой подачи топлива по сравнению со статической регуляторной характеристикой. Именно этим и объясняется снижение крутящего момента и мощности двигателя на том участке его регуляторной характеристики, на котором вследствие колебаний угловой скорости происходит «расслоение» регуляторной характеристики топливного насоса.
6.3.3. Коэффициент загрузки двигателя
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.