6.2.2. Структурная схема процесса колебаний остова и управления прямолинейным движением трактора
Гусеничный трактор. На сельскохозяйственных гусеничных тракторах целесообразно применять схему с задними ведущими колесами. Поэтому рассмотрим трактор с приводом гусеничной цепи от заднего колеса.
Вертикальные и продольно-угловые колебания остова трактора и неровности профиля пути приводят к взаимному перемещению оси ведущего колеса и оси последнего опорного катка. При перемещении задней части корпуса трактора вниз расстояние между осями ведущего колеса и последнего опорного катка, а также сила Т'р на ведущем колесе, уменьшаются (Т’р < Тр). Когда остов трактора движется вверх, рабочий участок обвода дополнительно нагружается и сила Т'р превосходит силу Тр натяжения рабочей ветви гусеницы.
Непрерывные колебания остова вызывают периодическое изменение нагрузки на двигатель, которое приводит к колебаниям в САР двигателя, а следовательно, и к колебаниям скорости трактора.
Когда остов трактора опускается и последний опорный каток под воздействием внешних сил приближается к ведущему колесу, происходит встречное разматывание гусеничной цепи, которое сопровождается провисанием ее ведущего участка.
В эксплуатации трактор не останавливается из-за провисания ведущего участка гусеничной цепи, поскольку расстояние между осями катка и ведущего колеса изменяется незначительно. Но отмеченный кинематический эффект вызывает временное замедление движения трактора, сменяющееся разгоном, и наоборот. Непрерывное чередование этих процессов, сопровождающее работу трактора в полевых условиях, создает дополнительные колебания нагрузки на двигатель, не зависящие от колебаний тягового сопротивления.
Структурная схема управления прямолинейным движением гусеничного трактора представлена на рисунке 6.2 На трактор действуют сила тягового сопротивления Ркр и другие факторы, вызывающие отклонение траектории движения на некоторую величину Yн от заданной траектории Yо.Для исправления направления движения водитель, который рассматривается в данном случае как элемент системы, включает механизм поворота αтр, вследствие чего возникает момент, поворачивающий трактор в сторону, противоположную той, в которую он разворачивается под действием внешних и внутренних сил.
Чтобы преодолеть разворачивающий момент, необходимо создать некоторое приращение тягового усилия и движущего момента на забегающем борту. Следовательно, двигатель необходимо дополнительно нагрузить некоторым моментом ∆Мс, в результате чего изменится его скоростной режим.
Изменение нагрузки на двигатель и колебания угловой скорости коленчатого вала, возникающие при этом, представляют собой общие координаты для двух колебательных процессов — управления прямолинейным движением гусеничного трактора и в САР двигателя.
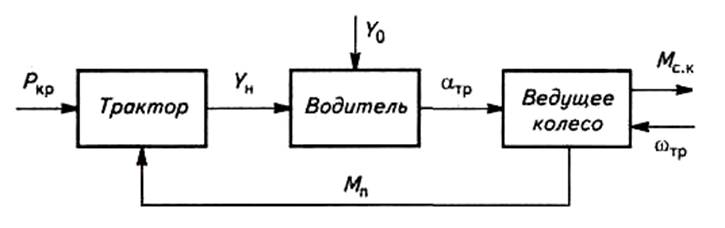
Рисунок 6.2 - Структурная схема управления прямолинейным движением трактора
Колесный трактор. Взаимосвязь колебаний остова и скорости движения колесного трактора показана на рисунке 6.3.
На обод колеса действует сила GHот остова трактора и угловая скорость трансмиссии ωтр, приводящая колесо во вращение. Эти воздействия в виде G’ни ωк передаются на шину. Помимо этого, на шину действуют реакция почвы Хк и сила сопротивления качению Pf, зависящие от характеристик (fи φ) опорной поверхности и формирующие на шине силу Рк. От неровностей qhпрофиля пути и переменной силы Gн возникает радиальная деформация шины, т. е. изменяются динамический и кинематический радиусы колеса.
Изменение радиуса качения колеса приводит к колебаниям поступательной скорости движения трактора даже при постоянной угловой скорости ωк, подводимой к ведущему колесу, так как
vт=ωкrк.
При неизменном тяговом сопротивлении на крюке трактора изменение динамического радиуса колеса вызывает изменение момента сопротивления на полуоси ведущего колеса, передаваемого на двигатель, что следует из зависимости
Мвед=Ркrд, где Рк — касательная сила тяги на ведущем колесе трактора.
Приращение момента сопротивления на ведущем колесе
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.