Из условия дополнительного входного напряжения для операционного усилителя, равного 10 В, принимаем Uзс.max = 10 B, тогда коэффициент узла согласования равен:
 (6.21)
(6.21)
Максимальная ЭДС преобразователя:
 (6.22)
(6.22)
Коэффициент передачи управляемого преобразователя УП (при максимальном значении напряжения управления 5 В и линеаризации регулировочной характеристики):
 (6.23)
(6.23)
С учетом требований технологического процесса по ограничению ускорения, принимаем момент уставки, равный Mmax (см. выражение 4.4). Допустимая погрешность регулирования момента выбираем 15 %, тогда момент стопорения равен:
 (6.24)
(6.24)
Напряжение задания скорости для пониженной характеристики замкнутой системы с учетом отключенной обратной связи по току:
 (6.25)
(6.25)
Скорость идеального холостого хода пониженной характеристики:
 (6.26)
(6.26)
Скорость на пониженной характеристике, соответствующая моменту уставки:
 (6.27)
(6.27)
Напряжение задания скорости для рабочей характеристики:
 (6.28)
(6.28)
Напряжение задания естественной характеристики: Uзс1 = 10 В.
Скорость идеального холостого хода рабочей характеристики:
 (6.29)
(6.29)
Скорость на рабочей характеристике, соответствующая моменту уставки:
 (6.30)
(6.30)
Скорость идеального холостого хода естественной характеристики:
 (6.31)
(6.31)
Скорость на естественной характеристике, соответствующая моменту уставки:
 (6.32)
(6.32)
Определим погрешность регулирования, но для начала найдем скорость на рабочей характеристике, соответствующую статическому моменту:
 (6.33)
(6.33)
Рабочая скорость, требуемая по заданию: ωс = 5,645 рад/с.
Ошибка регулирования:
![]() (6.34)
(6.34)
Погрешность регулирования:
 (6.35)
(6.35)
Таким образом, наша система соответствует требованиям технологического процесса. Требуемая погрешность должна быть меньше 7%, что обеспечивается.
Статические характеристики замкнутой системы представлены на рис. 3.3.
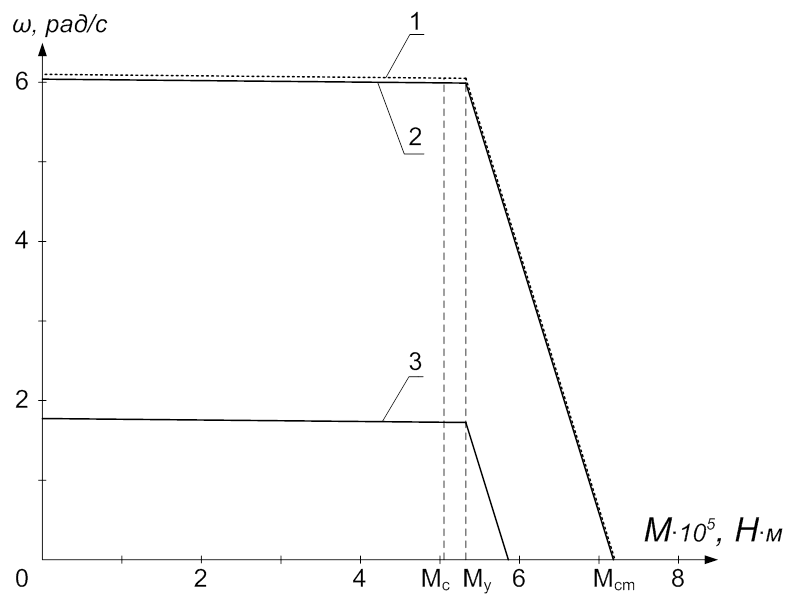
Рис. 3.3. Статические характеристики замкнутой системы: 1) естественная, 2) рабочая, 3) пониженная.
Коэффициент обратной связи по току:
 (6.36)
(6.36)
Электромагнитная постоянная времени:
 (6.37)
(6.37)
7. Расчет и анализ переходных процессов за цикл работы.
При расчете переходных процессов следует учитывать следующее: сигналы устройств в расчетах не должны превышать допустимые уровни физических устройств (для регуляторов это ±10 В). Поэтому необходимо при моделировании предусматривать узлы ограничения уровней сигналов или выбирать соответствующий уровень воздействий (задания или возмущения). При аналитических расчетах, как показывает опыт, отсутствие узлов ограничения не приводит к существенной погрешности.
При кусочно-линейной аппроксимации нелинейных характеристик расчет динамических процессов ведется по этапам на каждом линейном участке с контролем над значением переменной, определяющей окончание участка. На каждом этапе составляются дифференциальные уравнения, определяются корни, находятся аналитические решения с учетом начальных и установившихся значений координат для данного отрезка аппроксимации. Система дифференциальных уравнений, описывающих систему:
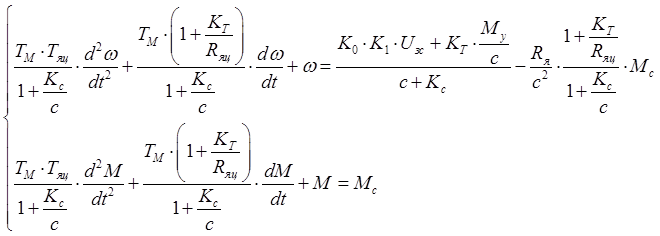 (7.1)
(7.1)
Правые части уравнений представляют собой установившиеся значения переменных. Корни характеристического уравнения системы:
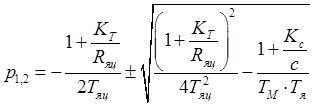 (7.2)
(7.2)
Вид аналитических решений уравнений системы (7.1) определяется характером корней (7.2) характеристического уравнения: комплексные либо вещественные. Процесс пуска происходит в несколько этапов, определяемых значениями тока якоря и момента.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.