Принцип работы механизма достаточно прост. Приводной двигатель вращает барабан и вместе с ним перемещает клети с грузом. Одновременно поднимается одна клеть и опускается другая. Это позволяет оптимизировать работу механизма и уменьшить типоразмер приводного двигателя.
В силу специфических условий работы к подъемникам предъявляют повышенные требования в части надежности и безопасности их работы. Наряду с общими требованиями в части надежности и безопасности в работе предъявляют ряд дополнительных требований, основными из которых являются: точность остановки клети (кабины) на заданном уровне; ограничение ускорений и замедлений при пуске и остановке клети.
Под точностью остановки клети понимают разность отметок пола клети и пола площадки, у которой останавливается клеть. Порог, образующийся из-за неточности остановки, представляет опасность для пассажиров, а также затрудняет погрузку и разгрузку. Для грузовых лифтов, загружаемых тележками, величина рассогласования допускается не более ±15 мм, а для остальных лифтов – не более ±50 мм. Она зависит от скорости движения кабины. При больших скоростях и автоматической остановке кабины на этаже необходимо предварительно снижать эти скорости до начала торможения тормозом лебедки. Это снижение может быть осуществлено или электрическим путем, или установкой в лебедке дополнительного микропривода.
В нашем случае величина ускорения указана в задании на курсовое проектирование.
2. Расчет и построение диаграмм скорости и статических нагрузок механизма.
Кинематическая схема механизма представлена на рис. 2.1. Основные параметры, используемые для расчета, приведены в таблице 1.
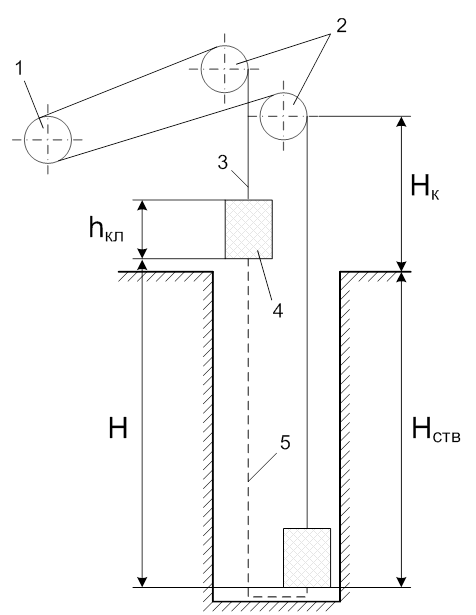
Рис. 2.1. Кинематическая схема шахтного подъемника.
На рис. 2.1. обозначено:
1) барабан подъемной машины; 2) направляющий шкив; 3) грузовой канат; 4) клеть или скип; 5) хвостовой канат.
Хвостовой канат служит для уравновешивания при подъеме и увеличения устойчивости всего механизма в целом.
Таблица 1.
Исходные данные к проекту.
|
Параметр |
Обозначение |
Значение |
|
Вес скипа |
G0, кН |
75 |
|
Грузоподъемность |
Gн, кН |
1000 |
|
Скорость подъема |
υп, м/с |
2.3 |
|
Диаметр барабана подъемной машины |
D, м |
4.4 |
|
КПД барабана |
ηб, о.е. |
0.935 |
|
Передаточное число редуктора |
ip |
5.4 |
|
КПД редуктора |
ηp, о.е. |
0.9 |
|
Вес 1м каната |
q, Н |
126 |
|
Жесткость 1м каната |
c1k, Н/м |
13∙109 |
|
Глубина ствола |
Нств, м |
320 |
|
Высота копра |
Нк, м |
40 |
|
Высота скипа |
hкл, м |
3.5 |
|
Высота подъема |
Н, м |
332 |
|
Момент инерции барабана |
Jб, кг∙м2 |
990 |
|
Момент инерции двигателя (ориентировочно) |
Jд, кг∙м2 |
9.5∙103 |
|
Скорость движения в направляющих |
υн, м/с |
0.5 |
|
Допустимое ускорение |
[а], м/с2 |
0.8 |
|
Время загрузки (выгрузки) |
t8, с |
160 |
|
Длина направляющих |
L, м |
4 |
Приведем нашу схему к одномассовой, для чего найдем приведенные к скорости двигателя момент инерции и статический момент. Для начала найдем скорость двигателя.
Скорость подъема равна υп = 2,3 м/с, тогда за 1 мин = 60сек пройденное расстояние равно:
![]() (2.1)
(2.1)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.