6. Расчет статических характеристик электропривода.
В процессе эксплуатации данного механизма необходимо регулировать скорость подъема, а так же ограничивать ускорение. Ускорение можно ограничивать, ограничивая пусковой (максимальный) момент. Поддержание скорости на определенном уровне будем обеспечивать за счет обратной связи по скорости. Ограничение момента, когда это необходимо (например, при пуске), будем за счет обратной связи по току якоря с отсечкой (зоной нечувствительности). Данная обратная связь будет включаться тогда, когда ток будет стремиться превысить допустимое значение. Таким образом, получаем систему с переменной структурой, функциональная схема которой представлена на рис. 6.1.
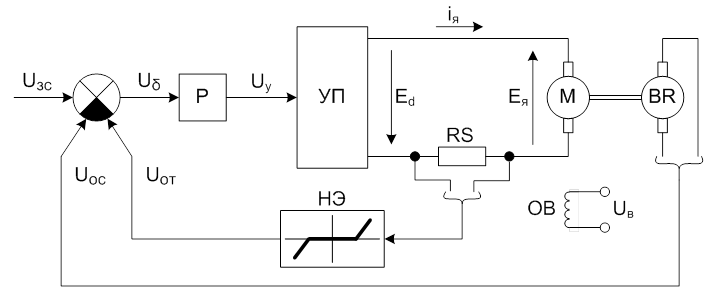
Рис. 6.1. Функциональная упрощенная схема системы с линейной отрицательной обратной связью по скорости и обратной связью по току с отсечкой.
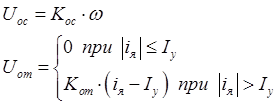
На рис. 6.1. обозначено: НЭ – нелинейный элемент выполняющий функцию узла отсечки, который включает обратную связь, если ток якоря превышает значения тока уставки Iу. Р – пропорциональный регулятор с коэффициентом усиления Kp; УП – управляемый преобразователь с коэффициентом передачи Кп; Uу, Uδ - сигналы управления и ошибки системы. Уравнения, описывающие обратные связи:
 (6.1)
(6.1)
Уравнения, описывающие систему ЭП без учета инерционности преобразователя и при включенных обратных связях:
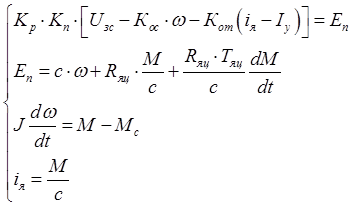 (6.2)
(6.2)
6.1. Характеристики разомкнутой системы.
Скорость идеального холостого хода при Еп = Uян = 930 В:
 (6.3)
(6.3)
Скорость, соответствующая номинальному моменту:
 (6.4)
(6.4)
Напряжение преобразователя, при котором обеспечивается рабочая скорость при Mc = 504.4 кН∙м:
 (6.5)
(6.5)
Скорость идеального холостого хода рабочей характеристики:
 (6.6)
(6.6)
Скорость, соответствующая номинальному моменту:
 (6.7)
(6.7)
Угловая скорость двигателя, соответствующая пониженной скорости подъема:
 (6.8)
(6.8)
Напряжение преобразователя, при котором обеспечивается пониженная скорость при Mc = 504.4 кН∙м:
 (6.9)
(6.9)
Скорость идеального холостого хода пониженной характеристики:
 (6.10)
(6.10)
Скорость, соответствующая номинальному моменту:
 (6.11)
(6.11)
Диапазон регулирования скорости:
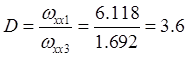 (6.12)
(6.12)
Статизм пониженной характеристики разомкнутой системы:
 (6.13)
(6.13)
Статические характеристики разомкнутой системы представлены на рис. 6.2.
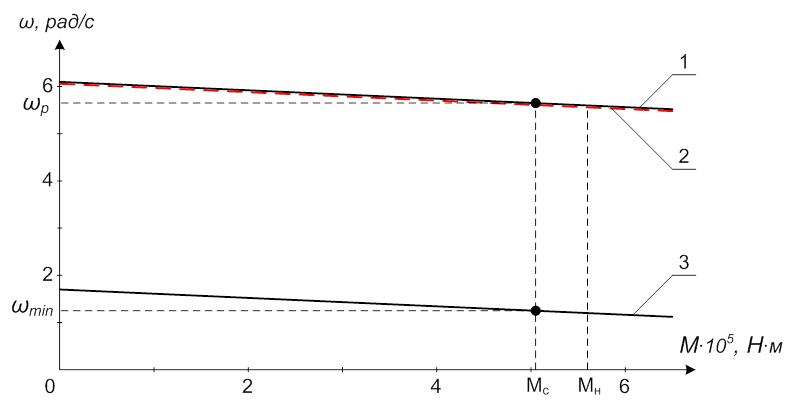
Рис. 6.2. Механические характеристики разомкнутой системы: 1) естественная, 2) рабочая, 3) пониженная.
6.2. Характеристики замкнутой системы.
Ток якоря, соответствующий статическому моменту:
 (6.14)
(6.14)
Требуемый статизм замкнутой системы равен Sз = 0,07.
Коэффициент передачи системы по скорости:
 (6.15)
(6.15)
Коэффициент передачи тахогенератора:
 (6.16)
(6.16)
Коэффициент обратной связи по скорости:
 (6.17)
(6.17)
Коэффициент передачи прямого канала:
 (6.18)
(6.18)
Максимальный сигнал обратной связи по скорости:
![]() (6.19)
(6.19)
Напряжение задания скорости при отсутствии узла согласования:
 (6.20)
(6.20)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.