На
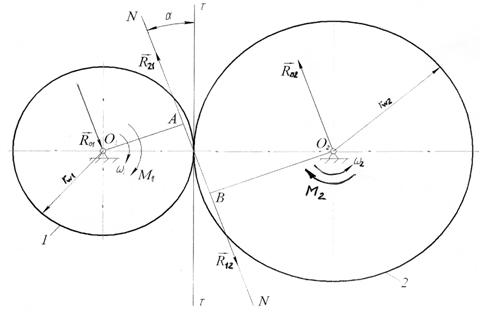
колесо 1 будут действовать две силы: реакция со стороны колеса 2 ![]() и реакция в кинематической паре О
и реакция в кинематической паре О
![]() . Они равны по величине, но противоположны по
направлению
. Они равны по величине, но противоположны по
направлению ![]() =-
=-![]() и представляют собой
пару сил с плечом О1А. Следует отметить, что О1А
= rb1 - радиус основной окружности (rb1=rw1cosα). Из условия
равновесия сил, действующих на звено 1 (шестерню):
и представляют собой
пару сил с плечом О1А. Следует отметить, что О1А
= rb1 - радиус основной окружности (rb1=rw1cosα). Из условия
равновесия сил, действующих на звено 1 (шестерню):
![]() .
.
Таким образом, по абсолютной величине реакция
![]()
Аналогично из условия равновесия сил, действующих на звено 2 (колесо):
![]() .
.
![]() =
=![]() =
=![]() или
или ![]() =
=![]() ,
,
где ![]() =
= ![]() -передаточное отношение;
-передаточное отношение;
![]() и
и
![]() - числа зубьев соответственно колес 1 и 2.
- числа зубьев соответственно колес 1 и 2.
Рис.19.
Пример 5. Силовой расчет кулачкового механизма
Пусть на толкатель по оси действует равнодействующая всех сил Q. Сюда включены силы технологического сопротивления движению толкателя, веса, действия пружин, инерции. Заданы вес G1 кулачка, сила инерции Ф1, положение центра масс и угол давления λ.Массой ролика 2 пренебрегаем.Кулачок вращается равномерно.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.