4. Программа работы
4.1. Исследовать работу вибробункера.
4.1.1. Включить вибробункер, установив переключатели на пульте управления в положения, указанные на рис. 4.
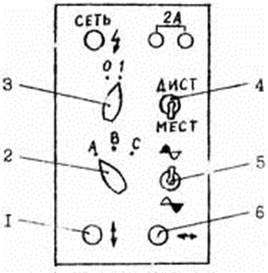
Рисунок 4 - Расположение органов управления на пульте вибробункера:
1 - регулятор амплитуды вертикальных колебаний; 2 - переключатель сдвига фаз; 3 - выключатель питания; 4 - переключатель связи с центральной системой управления; 5 - переключатель направления движения детали по лотку; 6 - регулятор амплитуды тангенциальных колебаний
4.1.2. Поворачивая регулятор амплитуды вертикальных колебаний, добиться максимального ее значения.
4.1.3. Положить в чашу вибробункера выданную преподавателем деталь. Поворачивая регулятор амплитуды тангенциальных колебаний определить влияние амплитуды колебаний на скорость движения детали по лотку.
4.1.4. Положить на чашу работающего вибробункера рядом две детали различной массы. Визуально определить, влияет ли масса детали на скорость движения.
4.1.5. Положить в чашу работающего
вибробункера рядом две одинаковые детали: одну - на лоток, другую - на дно
чаши. Визуально определить, влияет ли угол подъема лотка ![]() на скорость движения детали.
на скорость движения детали.
4.1.6. Положить в чашу работающего вибробункера одну за другой две детали (шарообразную и плоскую) с различными коэффициентами трения по лотку. Визуально определить, влияет ли коэффициент трения в паре лоток - деталь на движение детали.
4.1.7. Положить в чашу работающего вибробункера несколько (10…40 шт.) выданных преподавателем деталей. Определись число различных положений, в которых детали движутся по лотку.
4.1.8. Измерить скорость движения деталей по лотку, приняв длину его окружности 1,26 м.
4.2. Рассчитать ![]() и определить, в каком режиме
движутся детали по лотку вибробункера при условии
и определить, в каком режиме
движутся детали по лотку вибробункера при условии ![]() ,
,
![]() ,
, ![]() ,
,
![]() .
.
4.3. Рассчитать, обеспечит ли
вибробункер загрузку робота заготовками, при условии, что производительность
РТК - 25 деталей в минуту, а ![]() .
.
4.4. Оформить отчёт. В отчёт
заносятся, номер, название и дата выполнения лабораторной работы; цель и задачи
работы. Описываются наблюдения и делаются выводы о влиянии исследованных
факторов на движение детали по лотку. Выводы поясняются теоретическими
зависимостями. Приводятся расчеты ![]() ,
, ![]() и оцениваются результаты
согласно заданию.
и оцениваются результаты
согласно заданию.
5. Контрольные вопросы
5.1. Под действием какой силы деталь движется по лотку?
5.2. Почему угол ![]() ограничен
значением
ограничен
значением ![]() ?
?
5.3. Влияет ли коэффициент трения детали по лотку на её движение в режиме подбрасывания?
5.4. Чему равен коэффициент ![]() при активном ориентировании
деталей, подаваемых из вибробункера?
при активном ориентировании
деталей, подаваемых из вибробункера?
5.5. От чего зависит скорость движения деталей по лотку и как её повысить?
1. Подураев Ю.В. Мехатроника: основы, методы, применение : учеб.пособие для вузов / Ю.В.Подураев .— М. : Машиностроение, 2006 .— 256с.
2. Зенкевич С.Л. Основы управления манипуляционными роботами: учебник для вузов / С.Л.Зенкевич,А.С.Ющенко.-2-е изд., испр. и доп.- М. : Изд- во МГТУ им. Н.Э.Баумана, 2004.-480с.:ил.
1. Юревич Е.И. Основы робототехники: учебное пособие для вузов/Е.И.Юревич.-2-е изд., перераб. и доп.-СПб.: БХВ-Петербург, 2005.-401с.:ил.
3. Егоров О.Д. Механика и конструирование роботов : учебник для вузов / О. Д. Егоров .— М : Станкин, 1997 .— 519 с.
4. Кобринский А.А. Манипуляционные системы роботов: основы устройства, элементы теории / А.А.Кобринский, А. Е. Кобринский .— М. : Наука, 1985 .— 344 с. : ил.
5. Ноф Ш. Справочник по промышленной робототехнике : пер. с англ. Кн.1 / под ред. Ш.Нофа .— М. : Машиностроение, 1989 .— 478 с. : ил.
6. Ноф Ш. Справочник по промышленной робототехнике : пер. с англ. Кн.2 / под ред. Ш.Нофа .— М. : Машиностроение, 1990 .— 480 с. : ил.
7. Джонс, Дж. К. Методы проектирования : пер.с англ. / Дж. К. Джонс; под ред. В.Ф.Венды, В. М. Мунипова .— 2-е изд., доп. — М. : Мир, 1986 .— 326 с. : ил.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.