


































ВВЕДЕНИЕ
Автоматика – это наука об общих принципах и методах построения автоматических систем, т.е. систем, выполняющих поставленные перед ними цели без непосредственного участия человека.
В настоящее время тиристорные электроприводы получают все более широкое применение по мере улучшения качественных показателей тиристоров, выполнения их на большие токи и напряжения, улучшения перегрузочных характеристик, совершенствования схем преобразователей и схем управления. На добывающих предприятиях, на прокатных станах применяются регулируемые тиристорные электроприводы в однодвигательном и двухдвигательном исполнении общей мощностью до 13000 кВт. Для питания электроприводов больших мощностей применяются трансформаторы, позволяющие увеличить пульсность выпрямленного напряжения до 24
Преимущества тиристорных электроприводов: высокий коэффициент полезного действия; широкий диапазон рабочих температур; малая мощность управления; потенциальная надежность, реализуемая при правильном выборе их параметров и выполнения соответствующих требований эксплуатации, малая стоимость привода, в сравнении с применяемыми ранее типами электроприводов и многое другое.
При проектировании системы автоматического управления в первую очередь рассчитываются параметры заданной части системы (в данном случае параметры двигателя постоянного тока с независимым возбуждением, тиристорного преобразователя, а также датчиков и усилителей, формирующих цепи обратных связей и регуляторов). После этого производится синтез регуляторов системы в соответствии с найденными ранее параметрами заданной части. И, наконец, производится анализ полученной САУ, определение запасов устойчивости, показателей качества, вида графиков переходного процесса, производится подбор и фильтром и, при необходимости, корректировка принятых при проектировании параметров элементов САУ.
Спроектированная система должна иметь требуемое быстродействие, и при этом должно соблюдаться перерегулирование, система должна отвечать требуемым запасам устойчивости и обеспечивать высокую помехозащищенность.
Тема курсового проекта: «Расчет системы управления автоматизированным электроприводом». Т.е. выполнение курсового проекта предусматривает углубление и закрепление студентами основных сведений из теории автоматического управления путем самостоятельного решения основных вопросов проектирования систем автоматического управления электроприводами.
2 СТРУКТУРНАЯ СХЕМА ЗАДАННОЙ ЧАСТИ САУ
2.1 По заданной принципиальной схеме, разработаем структурную схему заданной части САУ. Схема представляет собой двухконтурную (по току и скорости) систему регулирования, организованную по принципу отрицательных обратных связей. В качестве двигателя представим структурную схему двигателя постоянного тока с независимым возбуждением.
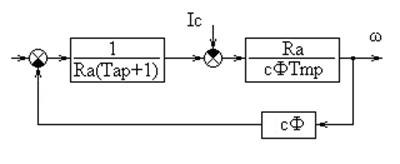
Схема 2.1 Структурная схема двигателя постоянного тока с независимым возбуждением
При этом в качестве модели тиристорного
преобразователя будем рассматривать апериодическое звено, с постоянной времени
Т![]() , которую
принимаем равной 0,002 с. Коэффициент передачи тиристорного преобразователя
можно найти по формуле
, которую
принимаем равной 0,002 с. Коэффициент передачи тиристорного преобразователя
можно найти по формуле
 ,
(2.1)
,
(2.1)
где Uу макс – максимально возможное напряжение в цепи управления (для современных преобразователей Uу макс = 10 В)
 |
Схема 2.2 Структурная схема системы автоматического регулирования
При синтезе САУ влиянием внутренней обратной связи по противоэдс пренебрегают, а по окончанию синтеза если она сильно влияет на процессы в системе, то вводят компенсацию через Wk
2.2 Согласно принципиальной схеме датчика тока (схема 2.3):
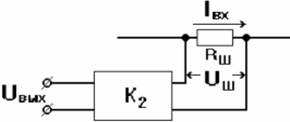
Датчик тока представляет собой безынерционное устройство с коэффициентом передачи
 ,
(2.2)
,
(2.2)
где Rш, Uнш, Iнш – номинальные данные выбранного шунта (тип – 150 ШСМ),
К2 – коэффициент согласующего усилителя
 Ом
Ом
2.3 Датчик скорости (схема 2.4) снабжен RC-фильтром, который обеспечивает снижение уровня высокочастотных помех на выходе датчика. Пренебрегая индуктивностью якорной цепи тахогенератора, запишем формулу для вычисления коэффициента обратной связи по скорости
 ,
(2.3)
,
(2.3)
где ![]() коэффициент
передачи тахогенератора
коэффициент
передачи тахогенератора  ,
,
![]() –
номинальные ЭДС и угловая скорость вращения тахогенератора (
–
номинальные ЭДС и угловая скорость вращения тахогенератора (![]() входят в исходные
данные),
входят в исходные
данные),
К3 – коэффициент передачи согласующего усилителя,
Кф – коэффициент передачи фильтра, в данном случае постоянная времени фильтра значительно (на несколько порядков) меньше других постоянных времени элементов заданной части системы, поэтому фильтром в расчетах можно пренебречь (Кф=1).
![]()
![]()
![]()
 Вб
Вб
![]()
Схема 2.4 Структурная схема датчика скорости
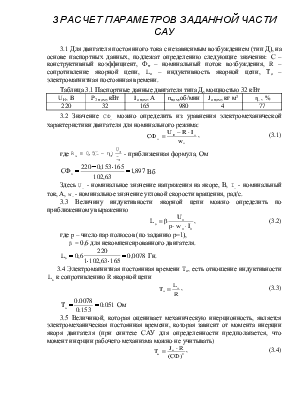
3 РАСЧЕТ ПАРАМЕТРОВ ЗАДАННОЙ ЧАСТИ САУ
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.