10.7 Определим коэффициент передачи САУ на основной гармонике. По графику коэффициент передачи САУ на основной гармонике. Построим ЛАЧХ замкнутой системы
|
|
Рисунок 10.10 ЛАЧХ замкнутой системы
При частоте основной гармоники 44 рад/сек, L(w)=20 Log (K) =
37,465 дБ, следовательно ![]() .
Определим по реакции САУ на основную гармонику w(t)макс
= 10.48, при заданной а1 = 0.14, следовательно
.
Определим по реакции САУ на основную гармонику w(t)макс
= 10.48, при заданной а1 = 0.14, следовательно  , определенные
коэффициенты совпадают с некоторой погрешностью.
, определенные
коэффициенты совпадают с некоторой погрешностью.
10.7 Теперь проанализируем случай Т = 0,1Та = 0,0051 с, определим запасы устойчивости, для регулятора полученного билинейным Z-преобразованием, пользуясь MATLAB 6.1 (Simulink)
|
|
|
|
|
|
Рисунок 10.11 ЛЧХ разомкнутой системы с цифровым регулятором скорости
Из графика (рис. 10.1) видно, что полученная система является устойчивой и обладает запасами устойчивости, удовлетворяющим требованиям задания:
 рад,
рад, ![]() дБ, полученные запасы ниже требуемых (
дБ, полученные запасы ниже требуемых (![]() рад,
рад, ![]() дБ), но их можно считать удовлетворительными.
дБ), но их можно считать удовлетворительными.
10.8 Смоделировав схему подадим на вход единичный ступенчатый сигнал
Рисунок 10.12 Временная диаграмма изменения скорости и тока
Сигнал был подан через апериодический фильтр, для
уменьшения перерегулирования, с единичным коэффициентом передачи и постоянной
времени Тф = 0,03 с. Фильтр позволил добиться практически нулевого
перерегулирования (по графику w(t): ![]() ), при требуемом быстродействии (tр = 0,061 с).
), при требуемом быстродействии (tр = 0,061 с).

Рисунок 10.13 Динамическая электромеханическая характеристика
10.9 Представим реакцию САУ на ступенчатое приложение
нагрузки ![]()
Рисунок 10.14 Временная диаграмма изменения скорости и тока при работе двигателя на заданную нагрузку
Рисунок 10.15 Динамическая электромеханическая характеристика
10.10 По графикам w(t) и i(t) определим установившуюся ошибку, вызванную
действием возмущения ![]() . Как
говорилось выше система обладает астатизмом первого порядка по отношению к
нагрузке, при набросе тока система отрабатывает без ошибки (Dw = 0),
т.е.
. Как
говорилось выше система обладает астатизмом первого порядка по отношению к
нагрузке, при набросе тока система отрабатывает без ошибки (Dw = 0),
т.е. ![]() , что видно из
графиков w(t) и w(i).
, что видно из
графиков w(t) и w(i).
10.10 Представим результаты работы САУ при действии приведенной ко входу помехи
|

Рисунок 10.16 Вид заданной помехи

Рисунок 10.17 Временная диаграмма изменения скорости и тока при действии помехи
![]()
![]()
Рисунок 10.18 Динамическая электромеханическая характеристика
10.11 Определим коэффициент передачи САУ на основной гармонике. По графику коэффициент передачи САУ на основной гармонике.
10.11.1 Построим ЛАЧХ замкнутой системы

Рисунок 10.19 ЛАЧХ разомкнутой системы с цифровым регулятором скорости, полученным билинейным преобразованием
При частоте первой гармоники 44,0 рад/с (log w =
1.643), L = 20 Log K = 37.715 дБ, т.е. ![]() .
.
10.11.2 Представим реакцию САУ на основную гармонику
Рисунок 10.20 Зависимости скорости и тока от времени при действии на САУ основной частоты (44 рад/сек)
![]()
![]()

Рисунок 10.21 Динамическая электромеханическая зависимость тока w(i)
10.11.3 По графику зависимости w(t) (рис. 10.20) определим амплитуду колебаний скорости: w(t)макс = 10.791 рад/с, при заданной а1 = 0,14, следовательно К = 77. Коэффициенты передачи САУ на основной гармонике определенные двумя способами, практически совпадают.
10.12 Проведем анализ работы САУ с цифровым регулятором, полученным билинейным преобразованием при Т = 0,5 Та = 0,0255 с. Для начала постоим ЛАЧХ разомкнутой системы

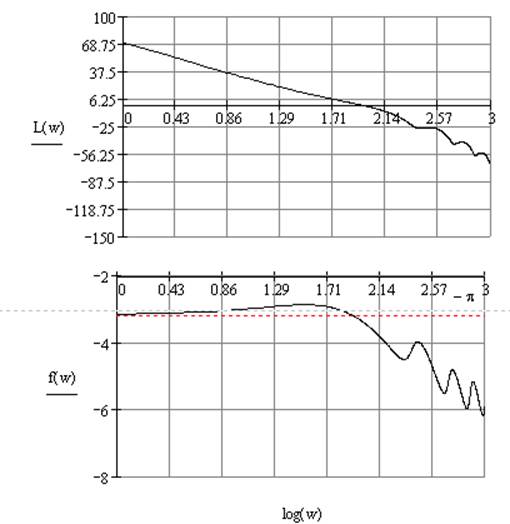
Рисунок 10.22 ЛЧХ разомкнутой системы, с цифровым регулятором скорости
10.13 По графику видно, что САУ находится на границе устойчивости, поэтому для дальнейших выводов о работоспособности, необходимо провести полный анализ.
10.13.1 Смоделировав схему подадим на вход единичный ступенчатый сигнал
Рисунок 10.23 Временная диаграмма изменения скорости и тока
Сигнал был подан через апериодический фильтр, для
уменьшения перерегулирования, с единичным коэффициентом передачи и постоянной
времени Тф = 0,03 с. Фильтр уменьшил перерегулирование (по графику w(t): ![]() ), при этом система работает очень медленно (tр = 0,55 с). То же показывает и зависимость w(i)
), при этом система работает очень медленно (tр = 0,55 с). То же показывает и зависимость w(i)
![]()
Рисунок 10.24 Динамическая электромеханическая характеристика
10.13.2 Попробуем увеличить постоянную времени фильтра до 0,2 с
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.