7.2 Для определения запасов устойчивости воспользуемся критерием устойчивости Найквиста для ЛЧХ. Для этого построим логарифмические амплитудную и фазовую частотные характеристики (рис. 7.1).
Рисунок 7.1 Логарифмические частотные характеристики синтезированной САУ
Критерий устойчивости Найквиста для ЛЧХ, указывает на
устойчивость системы, причем система имеет ненулевые запасы устойчивости. По
графикам видно: ![]() рад,
рад, ![]() дБ, полученные запасы немного ниже требуемых (
дБ, полученные запасы немного ниже требуемых ( рад,
рад, ![]() дБ), но их можно считать удовлетворительными.
дБ), но их можно считать удовлетворительными.
7.3 Пользуясь интегрированной программой MATLAB 6.1 (Simulink), смоделируем полученную систему и исследуем ее
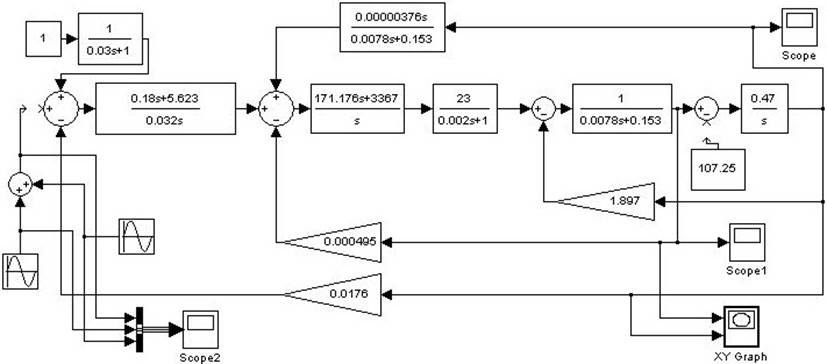
Схема 7.1 Исследуемая схема MATLAB 6.1 (Simulink)
7.4 Подаем на вход САУ единичный ступенчатый сигнал, строим графики изменения во времени угловой скорости и тока якоря двигателя.

Рисунок 7.2 График изменения угловой скорости во времени w(t)
Рисунок 7.3 График изменения тока двигателя во времени i(t)
Стоит отметить, что единичный ступенчатый сигнал был
подан через апериодический фильтр, с единичным коэффициентом передачи и
постоянной времени Тф = 0,03 с. Фильтр позволил добиться
перерегулирования даже ниже требуемого (по графику w(t): ![]() ), при требуемом быстродействии (tр = 0,062 с).
), при требуемом быстродействии (tр = 0,062 с).
7.5 Результаты расчета представим в виде динамической электромеханической характеристики w(i)
![]()
Рисунок 7.4 Динамическая электромеханическая характеристика
7.6 Представим реакцию САУ на ступенчатое приложение
нагрузки ![]() , относительное
значение нагрузки на валу Ic/Iн = 0,65, что соответствует Iс =107.25
, относительное
значение нагрузки на валу Ic/Iн = 0,65, что соответствует Iс =107.25
Рисунок 7.5 График изменения угловой скорости во времени w(t)
Рисунок 7.6 График изменения тока двигателя во времени i(t)
![]()
![]()

Рисунок 7.7 Динамическая электромеханическая характеристика
7.7 По графикам w(t) и i(t) определим установившуюся ошибку, вызванную
действием возмущения ![]() . Как
говорилось выше система обладает астатизмом первого порядка по отношению к
нагрузке, при подаче ступенчатого сигнала по току система отрабатывает без
ошибки (Dw = 0),
т.е.
. Как
говорилось выше система обладает астатизмом первого порядка по отношению к
нагрузке, при подаче ступенчатого сигнала по току система отрабатывает без
ошибки (Dw = 0),
т.е. ![]() , что видно из
графиков w(t) и w(i).
, что видно из
графиков w(t) и w(i).
7.8 Представим результаты работы САУ при подаче на вход помехи
|
Рисунок 7.8 Вид подаваемой помехи

Рисунок 7.9 График изменения угловой скорости во времени w(t)
Рисунок 7.10 График изменения тока двигателя во времени i(t)
![]()
![]()
Рисунок 7.11 Динамическая электромеханическая характеристика
7.9 Определим коэффициент передачи САУ на основной гармонике.

Рисунок 7.12 Реакция на основную гармонику и ЛАЧХ замкнутой системы
При частоте основной гармоники 44 рад/сек: L(w)=20 Log (K) = 37,3
дБ, следовательно ![]() . Определим
по реакции САУ на основную гармонику w(t)макс = 10.26, при заданной а1
= 0.14, следовательно
. Определим
по реакции САУ на основную гармонику w(t)макс = 10.26, при заданной а1
= 0.14, следовательно  ,
определенные коэффициенты совпадают до 0,001.
,
определенные коэффициенты совпадают до 0,001.
7.10 Проверим работоспособность САУ.
![]()
Рисунок 7.12 Динамическая электромеханическая характеристика при действии одновременно единичного ступенчатого сигнала, нагрузки и помехи
8 КОНСТРУКТИВНЫЙ РАСЧЕТ АНАЛОГОВОГО РЕГУЛЯТОРА СКОРОСТИ
8.1 В пункте 4.8 мы получили передаточную
характеристику регулятора скорости методом СПР (выражение 4.6)  . Подставив значения
получим
. Подставив значения
получим
 ,
(8.1)
,
(8.1)
8.2 Приведем к виду  , приняв Ти =
1 с, получим
, приняв Ти =
1 с, получим
 ,
(8.2)
,
(8.2)
8.3 Очевидно, что регулятор можно разбить на два динамических звена первого порядка, т.е. интегратор с единичной постоянной времени и форсирующее звено. При этом Кф = 471, Тф = 0,016 с, Ти = 1 с.
8.4 Принципиальная схема регулятора скорости будет выглядеть следующем образом

Рисунок 8.1 Принципиальная схема регулятора скорости
8.5 Построим логарифмическую амплитудную частотную характеристику рассчитываемого регулятора

Рисунок 8.2 ЛАЧХ регулятора скорости
8.6 Рассчитаем параметры регулятора
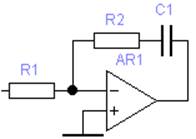
Рисунок 8.3 Вид регулятора
8.6.1 Пределы изменения номиналов резисторов 10 кОм – 10 МОм, рекомендуемый диапазон 100 кОм – 1 МОм.
 ,
(8.3)
,
(8.3)
Отсюда  ,
где R1 примем
100 кОм, следовательно
,
где R1 примем
100 кОм, следовательно  » 20 нФ.
» 20 нФ.
8.6.2 Из (8.3) получим номинал резистора R2:  кОм.
кОм.
9 СИНТЕЗ ЦИФРОВОГО РЕГУЛЯТОРА СКОРОСТИ
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.