В головках МИГ с двухрычажной передачей в качестве второго компенсатора использовано изменение начального угла δα2, кулисной передачи при неизменной ошибке начального угла синусного механизма. Этот компенсатор реализован в виде эксцентрика в длинном плече синусно-кулисного рычага (рис. 5)
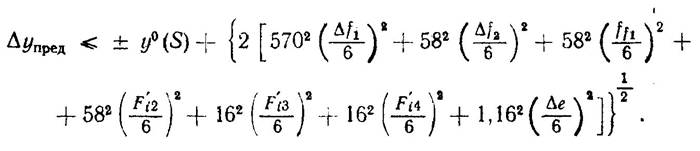
Некомпенсируемая погрешность головок МИГ с двухрычажной передачей определяется рядом первичных ошибок, на которые установлены соответствующие допуски: Δƒ1, Δƒ2 - на погрешность неплоскостности толкателя синусного механизма и кулисы; ƒƒ1 — на погрешность профиля зуба зубчатого сектора; F'i2, F'i3, F'i4—на кинематическую погрешность соответствующих зубчатых колес; Δе — на эксцентриситет шкалы.
С учетом законов распределения первичных ошибок и номинальных значений параметров имеем следующее выражение для общей предельной погрешности :
Колеса z1 и z2 выполнялись по шестой степени кинематической точности, а колеса z3 и z4 - по седьмой степени кинематической точности.
Согласно ГОСТ 9178—72 ƒƒ1= 0,01 мм; F'i2 = 0,018 мм; F'i3 = 0,034 мм; F'i4 =0,024 мм; Δƒ1 = Δƒ2 = 0,0005 мм.
Подставляя допускаемые значения погрешностей, имеем
Δyпред ≤ 2,6 мкм.
Некомпенсируемая часть этой погрешности определяется в основном кинематической погрешностью зубчатых колес z2 и z3, вследствие применения двухступенчатой зубчатой передачи.
Перейти к одноступенчатой зубчатой передаче удалось за счет применения в измерительном механизме многооборотных рычажно-зубчатых головок МИГ рациональной трехрычажной передачи .
Параметры измерительных головок МИГ с трехрычажной передачей (обозначения согласно схемы на рис. 13) следующие: ρ= 6,8 мм для 1 МИГ; l= 23,5 мм; R = 8,2 мм; z1 = 280; р = 13,6 мм для 2МИГ; r = 34 мм; L = =13,4 мм; z2 = 11.
Остальные параметры, а также цена и длина деления шкалы равны параметрам головки МИГ предыдущей модели.
Общее передаточное отношение головок.

Причем общее передаточное отношение двух кулисных передач:

Значения r/(r — l) и L/R + 1 для механизма выбраны из условия В3 = 0,
Оценим теоретическую погрешность головок. Поскольку член третьей степени разложения ФП трехрычажного механизма при выбранных значениях параметров равен нулю, теоретическая погрешность определяется членом пятой степени
Δy°max(s)= ±0,15 мм.
Это пренебрежимо малая величина при длине деления 1 мм, и дальнейшего уточнения численных параметров не требуется.
Применение рациональной трехрычажной передачи позволило реализовать большое передаточное отношение в рычажной части механизма при пренебрежимо малой нелинейности. Это, в свою очередь, дало возможность увеличить длину синусного рычага до 7 мм (в 1МИГ) и выполнить зубчатую передачу одноступенчатой в виде пары сектор — триб. Выражение для компенсируемой погрешности головок с трехрычажной передачей имеет вид

Все обозначения первичных ошибок согласно рис. 10, в и 13. Из выражения для компенсируемой погрешности видно, что в головках с трехрычажной передачей требуется применение двух компенсаторов погрешностей изготовления. Первый компенсатор аналогичен остальным конструкциям головок, а второй выполнен в виде шарнирного соединения синусного 1 и кулисного 4 рычагов, соединенных винтом в секторном пазу (рис. 14). Такой компенсатор позволяет, так же как в ранее описанной модели МИГ, изменять величину начального угла первой кулисной передачи δα2 и тем самым компенсировать величину члена погрешности с S2.
Некомпенсируемая погрешность трехрычажной головки умен-шится вследствие применения одноступенчатой зубчатой передачи, в связи с чем коэффициенты влияния некомпенсируемой погрешности зубчатых колес невелики
![]()
где δƒ1 , δƒ2 , δƒ3 — неплоскостность толкателя и непрямолинейность кулисных штифтов соответственно; ƒƒ1 — погрешность профиля зуба зубчатого сектора; F'i2 - кинематическая погрешность многооборотного триба.
Допустимые отклонения при изготовлении Δƒ1= Δƒ2 = Δƒ3= 0,0005 мм; ƒƒ1= 0,006 мм; F'i2 = 0,020 мм; δе = 0,2 мм.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.