|
Марка (модель) |
ИРБ |
ИРТ |
|
Цена деления, мм |
0,01 |
0,01 |
|
Диапазон измерений, мм |
0 – 0,8 |
0 – 0,8 |
|
Диаметр присоединительного штифта, мм |
5h7 |
5h7 |
|
Габаритные размеры, не более,мм |
83x30x24 |
70x30x24 |
Поскольку оба варианта исполнения имеют единый измерительный рычажно-зубчатый механизм, подробно рассмотрим конструкцию индикатора ИРБ, являющейся базовой.
Схема индикатора представлена на рис.3, а конструкция – на рис.4.
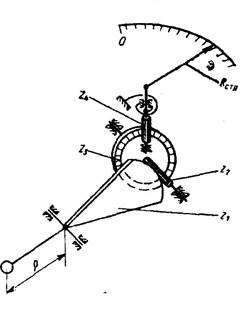
Рис.3 Кинематическая схема рычажно-зубчатого индикатора ИРБ
Индикатор состоит из корпуса 16 коробчатой формы и крышки 19, в которой в камневых опорах 30 на оси 29 установлен измерительный наконечник 31, связанный фрикционной передачей с зубчатым сектором 26. Усилие фрикционного соединения обеспечивается плоской пружиной 27 и шайбой 28. Вращение сектора передаётся через зубчатое колесо 22 и торцевое зубчатое колесо 21 на центральный триб 8, на конусной части 6 которого установлен с посадкой на конус футер 7 со стрелкой-указателем 4. Весь зубчатый механизм собран в платах 14 и 11, соединенных колонками 9 с помощью винтов 3.
На оси центрального триба 8 установлена спиральная моментная пружина 5, закрепление концов которой аналогично конструкции часового индикатора. Шкала индикатора 10, закрытая защитным стеклом 12, с пружинным кольцом 13 установлена в ободке 15, который имеет возможность поворота относительно корпуса индикатора, но удерживается на нем с помощью фигурной пружины 2.
Измерительное усилие индикатора обеспечивается проволочной пружиной 24, закрепленной на оси 23. Изменить направление измерительного усилия можно поворотом рычага 25, положение которого фиксируется фрикционной пружиной. Измерительный наконечник может разворачиваться относительно корпуса прибора. Для зажима индикатора в кронштейне стойки он снабжен зажимным стержнем 18. Соединение корпуса 16 и крышки 20 обеспечивается винтами 17.
Измерительная поверхность наконечника армирована твердым сплавом. Следует отметить, что малые габариты и незначительное усилие позволяет применять индикатор в труднодоступных местах, а также в случаях, требующих малого измерительного усилия.
Рассмотрим точностные возможности индикаторов такого типа. Параметры индикатора следующие : ρ =10,25 мм; z1=270; z2=20; z3=72; z4=12; Rстр=12,5мм; b=0,95мм;
с=0,01 мм; S max=0,8 мм, где b и c – длина и цена деления шкалы соответственно; S max – диапазон измерения индикатора.
Требуемое передаточное отношение измерительного механизма
I = b/c=0,95 / 0,01= 95
обеспечивается параметрами механизма
I= 1/ρ ∙ z1 / z2 ∙ z3 / z4 ∙ R стр = 1/10,25 ∙ 270/20 ∙ 72/12 ∙ 12,5=95
Оценим теоретическую погрешность индикатора. Ось наконечника в момент измерения должна быть перпендикулярна направлению измеряемой величины, вследствие чего имеем схему симметричного синусного механизма с нулевым начальным углом. Тогда согласно табл.1 теоретическая погрешность
Δ y°(S)= 1/6 ∙ (S3max / ρ3 )∙ (z1 / z2 )∙ (z3 / z4 ) ∙ R стр = 0,06 мм что с учётом длины и цены деления шкалы индикатора составляет пренебрежительно малую величину.
В рычажно-зубчатом индикаторе с боковым расположением наконечника не предусмотрены компенсаторы погрешностей изготовления, а величина систематической погрешности так же, как в индикаторах часового типа, определяется кинематическими погрешностями зубчатых колес и составляет около 0,01 мм.
К индикаторам с боковым наконечником выпускается специальный набор принадлежностей, предназначенный для проверки правильности вращения (биения) наружных и внутренних поверхностей, контроля деталей при их обработке и поверке на станках, при монтажных и слесарно-сборочных работах. Наличие в наборе специальных зажимных устройств позволяет использовать принадлежности для самых разнообразных работ.
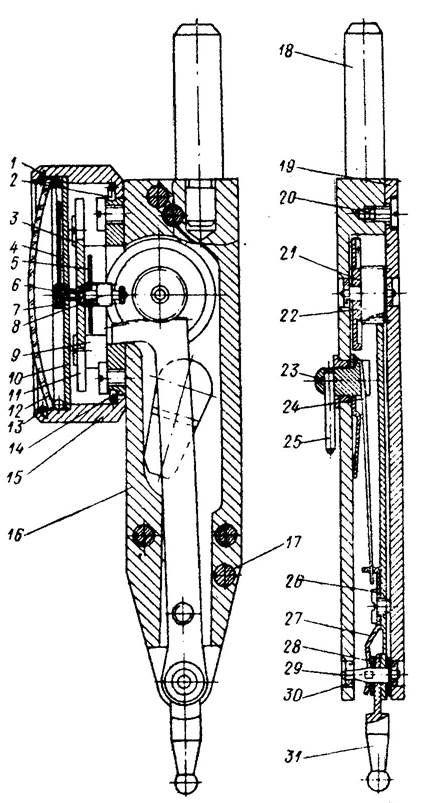
Рис.4 Индикатор ИРБ
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.