Второй
класс методов, основанный на теореме Ферма, дающей необходимые условия
экстремума, приводит в общем случае к решению трансцендентной системы уравнений
Каждый из этих методов имеет свои достоинства и недостатки, которые и определяют область их применения.
Рассмотрим один из возможных прямых методов расчета оптимальной программы для автономной, т. е. независящей явно от времени, системы автоматического управления. Будем изучать систему
![]() (1.13-14.40)
(1.13-14.40)
с функционалом
 (1.13-14.41)
(1.13-14.41)
и граничными условиями
![]() (1.13-14.42)
(1.13-14.42)
Ограничиваясь простейшей разностной схемой (схема Эйлера), заменим уравнение (1.13-14.40.) и функционал (1.13-14.41) следующими выражениями:
![]() (1.13-14.43)
(1.13-14.43)
![]() (1.13-14.44)
(1.13-14.44)
где tk = kτ, X(tk) = Хк, U(tk) = Uk. К уравнению (1.13-14.43) должно быть добавлено начальное условие Х(0)=Х0 и условие цели Х(Т)=ХТ=XN. Кроме того, на изменение управления и фазового вектора могут быть наложены и другие ограничения, типа UkÎGk, где Gk - некоторые множества.
Соотношения (1.13-14.43) позволяют произвести последовательное исключение фазовых векторов:
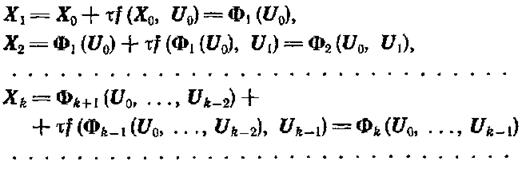
Таким образом, функционал (1.13-14.44) становится функцией только векторов U0, ..., UN-1:
 (1.13-14.45)
(1.13-14.45)
Где ![]()
Задача минимизации функционала (1.13-14.44) при ограничении UkÎGk, - стандартная задача математического программирования. Трудности решения этой задачи, как и многих других, однотипных с ней, в основном определяются ее размерностью, т.е. количеством переменных и количеством ограничений, на них налагаемых. В рассматриваемой выше схеме редукции число переменных определяется выбором количества интервалов N, что в свою очередь обусловливается требованиями точности. В технических задачах (динамика полета, запуск космических аппаратов и спутников, управление крупнотоннажными технологическими производствами и т. д.) число N достигает больших величин, и размерность задачи nxN (n - размерность фазового вектора) делает ее решение чрезвычайно трудоемкой. В подобных ситуациях на первый план выходят методы, которые используют необходимые условия, так как они мало чувствительны к увеличению числа интервалов разбиения.
1.13-14.4. Принцип максимума Понтрягина.
Начнем с самого простого примера задачи оптимального управления. Пусть F(t,X,U)=Fi(t)·u(t), где Fi(t) - непрерывная функция на отрезке [T,0]. Рассмотрим задачу
 (1.13-14.46)
(1.13-14.46)
Совсем несложно понять, что изучаемый интеграл будет минимальным, если в случае Fi(t)·> 0 положить u(t)=1, т. е. u(t)= - signF1(t).
По определению: sign t = 1 при t > 0: =0 при t = 0: = -1 при t < 0
И в более общей задаче
 (1.13-14.47)
(1.13-14.47)
следует поступать аналогично, а именно — надо для каждого tÎ [0, Т] найти и из отрезка [u1, u2] при котором функция F(t,u) имеет минимум по u. Это можно сформулировать в виде следующего утверждения: для того чтобы функция u(t) была решением задачи (1.13-14.47) необходимо, чтобы
![]() (1.13-14.47.а)
(1.13-14.47.а)
Теперь становится ясной идея, заложенная в принцип максимума Понтрягина. К задаче оптимального управления (1.13-14.34. и далее) применим общий замысел Лагранжа, только несколько модифицированный. Нужно, сняв ограничение в (1.13-14.36.), составить функцию Лагранжа, которая будет иметь вид

(1.13-14.48)
а затем рассмотреть задачу
![]() (1.13-14.49)
(1.13-14.49)
При этом необходимо по X, как и раньше, составить уравнение Эйлера, а по U применить утверждение типа (1.13-14.47). Но так как все члены с U в функции Лагранжа входят со знаком минус, то удобнее сформулировать это утверждение в виде принципа максимума. (Очевидно, что mах{- φ*}= - min{φ*}. Тогда решение задачи {x°1(t), x°2(t), ..., x°n(t)},. {u°1(t), u°2(t), ..., u°m(t)} будет удовлетворять условию
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.