4. Имеется возможность оценки вероятности каждого условия, в котором, в будущем, может оказаться ГПС.
5. Сформулировано правило принятия решения. Решение может, приниматься в условиях определенности, риска и неопределенности.
Если решение принимается в условиях определенности, то каждое действие (выбор варианта ГПС) имеет известный результат. В условиях риска и неопределенности каждое действие может иметь несколько результатов в зависимости от условий, но в первом случае каждое условие имеет известную вероятность, а во втором – неизвестную.
Постановка задачи
Введем следующие обозначения:
![]() (
(![]() ,
,
![]() , … ,
, … , ![]() ,
… ,
,
… , ![]() ) – возможные альтернативные решения
(варианты ГПС);
) – возможные альтернативные решения
(варианты ГПС);
![]() (
(![]() ,
,
![]() , … ,
, … , ![]() ,
… ,
,
… , ![]() ) – ряд возможных условий, в которых
может функционировать ГПС;
) – ряд возможных условий, в которых
может функционировать ГПС;
![]() (
(![]() ,
,
![]() , … ,
, … , ![]() ,
… ,
,
… , ![]() ) – вероятность выполнения
определенного условия
) – вероятность выполнения
определенного условия ![]() , причем
, причем ![]() ,
,  .
.
Каждая пара (![]() ,
,![]() ) связана с результатом
функционирования ГПС, который обозначим
) связана с результатом
функционирования ГПС, который обозначим ![]() .
Связь альтернативного решения (выбор варианта ГПС), условия и результата может
быть представлена в виде матрицы (табл.2). Если решение выносится в условиях
определенности, то размерность этой матрицы понижается до вектора. Для примера
рассмотрим задачу создания ГПС толстопленочных микросборок. Известно, что
существуют три концепции создания таких ГПС: на основе завода-автомата (
.
Связь альтернативного решения (выбор варианта ГПС), условия и результата может
быть представлена в виде матрицы (табл.2). Если решение выносится в условиях
определенности, то размерность этой матрицы понижается до вектора. Для примера
рассмотрим задачу создания ГПС толстопленочных микросборок. Известно, что
существуют три концепции создания таких ГПС: на основе завода-автомата (![]() ); гибких автоматизированных цехов (
); гибких автоматизированных цехов (![]() ); отдельных быстрозаменяемых модулей
(
); отдельных быстрозаменяемых модулей
(![]() ).
).
Типовая ГПС может
эксплуатироваться при двух возможных условиях: толстопленочная технология
сохранит в обозримом будущем свое доминирующее значение (![]() ) и, будет вытесняться какой-либо
более прогрессивной технологией (
) и, будет вытесняться какой-либо
более прогрессивной технологией (![]() ).
).
Комбинация альтернативных вариантов ГПС и условий развития технологии дает шесть результатов: производительность труда; фондоотдачу и т.д. Мы будем рассматривать экономический эффект при эксплуатации ГПС.
Очевидно, что первая
концепция ![]() для первого условия
для первого условия ![]() наиболее благоприятна, так как
создание завода-автомата при доминирующем значении толстопленочной технологии
даст лучшие результаты.
наиболее благоприятна, так как
создание завода-автомата при доминирующем значении толстопленочной технологии
даст лучшие результаты.
С другой стороны, если толстопленочная технология утратит свое доминирующее положение, то создание ГПС на базе завода-автомата может иметь отрицательное значение -большие потери. Подобное утверждение особенно близко будет к истине, если к моменту окончания разработки ГПС заложенные в нее решения морально устареют.
Третий вариант ГПС ![]() наиболее подходит для второго
условия
наиболее подходит для второго
условия ![]() , так как в систему можно будет
оперативно вводить новые модули, использующие новые ТП.
, так как в систему можно будет
оперативно вводить новые модули, использующие новые ТП.
Положим, что экономический эффект от эксплуатации ГПС в терминах поставленной задачи выразится матрицей (табл. 2).
Таблица 2
|
А |
S |
|
|
S1 |
S2 |
|
|
a 1 |
100 |
25 |
|
a 2 |
90 |
65 |
|
a 3 |
75 |
75 |
Решение задачи
Если известно, что
толстопленочная технология не утратит своего доминирующего значения, то при
принятии решения необходимо пользоваться только первым столбцом. Ясно, что в
этих условиях будет выбран вариант ![]() , так как он
позволяет получить наибольший результат.
, так как он
позволяет получить наибольший результат.
Если с вероятностью, равной
единице, известно, что толстопленочная технология к окончанию разработки ГПС
утратит свое доминирующее положение, то выбирается альтернатива ![]() .
.
Если каким-либо образом удается определить эту вероятность, тогда выбор решения осуществляется в условиях риска.
Предположим, что в условиях
риска ![]() ;
; ![]() .
Тогда при выборе решения определяется ожидаемое значение каждого действия (выбора
соответствующего варианта ГПС), а затем выбирается вариант ГПС с наибольшим
ожидаемым значением.
.
Тогда при выборе решения определяется ожидаемое значение каждого действия (выбора
соответствующего варианта ГПС), а затем выбирается вариант ГПС с наибольшим
ожидаемым значением.
Ожидаемая оценка результата
при выборе варианта ГПС - ![]() выражается
следующим образом:
выражается
следующим образом:
 .
.
Для примера табл. 2 можно записать платежную матрицу (табл. 3)
Таблица 3
|
Тип ГПС |
|
|
|
|
|
100 |
25 |
92,5 |
|
|
90 |
65 |
87,5 |
|
|
75 |
75 |
75,0 |
Поскольку ![]() имеет наибольшее ожидаемое значение,
необходимо выбрать вариант ГПС -
имеет наибольшее ожидаемое значение,
необходимо выбрать вариант ГПС - ![]() .
.
Для случая ![]() и
и ![]() -
-
![]() = 77,5;
= 77,5; ![]() =
82.5;
=
82.5; ![]() = 75,0.
= 75,0.
Выбираем вариант ГПС - ![]() .
.
При отсутствии информации о вероятностях появления условий можно вычислить ожидаемые значения каждого выбора для различных вероятностей и определить границы ожидаемых значений результата для каждого выбора. Для рассматриваемого примера составим табл. 4 зависимости выбора структуры ГПС от вероятности стратегии.
Таблица 4
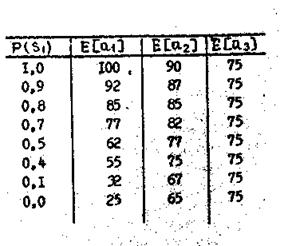
Выделенные в табл. 4 значения показывают, какие альтернативные варианты должны быть выбраны в соответствующих ситуациях:
1,0 ![]() 0,8
-
0,8
- ![]() ;
;
0,8 ![]() 0,4
-
0,4
- ![]() ;
;
0,4 ![]() 0,0
-
0,0
- ![]() .
.
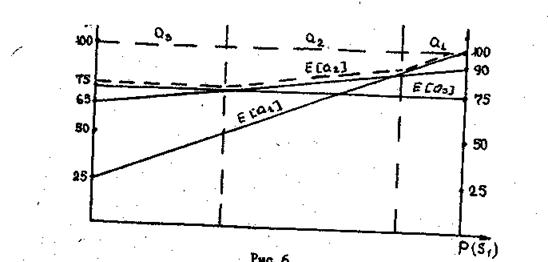
Полученное правило выбора
может быть проиллюстрировано в виде
графика (рис. 6). По оси ординат откладываются значения ![]() из
табл. 4, а по оси абсцисс - соответствующие им вероятности
из
табл. 4, а по оси абсцисс - соответствующие им вероятности ![]() . Максимальные значения
. Максимальные значения ![]() в заданной точке
в заданной точке ![]() дают возможность определить выбор
варианта структуры ГПС.
дают возможность определить выбор
варианта структуры ГПС.
2. ОРГАНИЗАЦИОННО-ТЕХНОЛОГИЧЕСКИЕ ОСНОВЫ ГПС
2.1. Основные принципы организации группового производства
Групповое производство нужно рассматривать, во-первых, как производственную систему, для которой требуется новый, более совершенный характер разработки, управления и распределения производственных задач и, во-вторых, как организационную основу для построения гибких автоматизированных и автоматических производств [9,11] . Введение новой организации производства, обеспечивающей резкое сокращение производственных циклов и внутрицеховых перемещений, уменьшение незавершенного производства, более быстрое освоение новых изделий, связано в ряде случаев с коренной перестройкой давно уже вошедшей в практику формы создания производств, цехов и участков по функциональному или технологическому признаку, когда на участках выполняются над разными деталями однородные операции.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.