Двигатели сериесного возбуждения находят широкое применение для электроприводов с тяжелыми условиями пуска, так как они легко переносят перегрузку. Но эти двигатели не могут работать в режимах близких к холостому ходу, поэтому для сериесных двигателей запрещены ременные передачи и фрикционные муфты, которые могут проскальзывать, не передавая необходимый момент. (8)
Для сериесных двигателей возможны те же способы регулирования скорости, что и для двигателей независимого возбуждения . На рисунке 64 представлены механические характеристики сериесного двигателя при регулировании скорости реостатом в цепи якоря. Недостатки и достоинства этого способа регулирования так же аналогичны.
Аналогично характеристикам независимого возбуждения изменяются механические характеристики сериесных двигателей при изменении магнитного потока: при ослаблении магнитного поля в области малых моментов скорость возрастает, а в области больших моментов уменьшается .
Вопросы для самоконтроля.
1.Запишите формулы скоростной и механической характеристики двигателя постоянного тока независимого возбуждения. (1,2)
2. Какие имеются принципиальные возможности регулирования скорости двигателя постоянного тока? (3)
3. От чего зависит диапазон регулирования двигателя постоянного тока независимого возбуждения? (4)
4. Чем ограничивается диапазон регулирования изменением магнитного потока? (5)
5. Напишите формулу скоростной характеристики двигателя последовательного возбуждения.(6)
6. . Напишите формулу механической характеристики двигателя последовательного возбуждения (7)
7. Почему для сериесных двигателей запрещены ременные передачи? (8)
Рабочими характеристиками
называют зависимость основных эксплуатационных параметров машины постоянного
тока от полезной мощности или тока якоря. Основными эксплуатационными
параметрами являются угловая частота ротора, электромагнитный и полезный
моменты двигателя, ток якоря и кпд двигателя. Зависимость скорости ротора от
тока якоря (рисунок 39) представляет собой кривую определяемую формулой  .
.
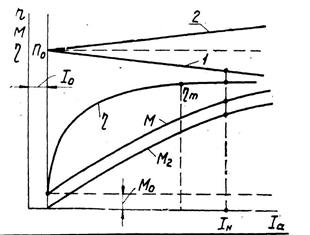
Рис.39 Рабочие характеристики двигателя постоянного тока параллельного и независимого возбуждения
Уменьшение частоты вращения происходит не только за счет падения напряжения в якорной цепи, но и из-за размагничивающего действия реакции якоря. Применение легкой сериесной обмотки позволяет уменьшить наклон характеристики.
Зависимость полезного момента от тока якоря начинается в начале координат и отличается от прямой линии только потому, что частота вращения ротора с ростом полезной мощности слабо падает. Характеристика кпд двигателя от тока якоря, также как аналогичная характеристика генератора постоянного тока имеет максимум мощности достигаемый при равенстве постоянных потерь и потерь, пропорциональных квадрату тока.
Зависимость электромагнитного момента похожа на кривую полезного момента только начинается не в начале координат.
Зависимость угловой частоты вращения якоря от полезной мощности сериесного двигателя похожа на его механическую характеристику (рисунок 40).
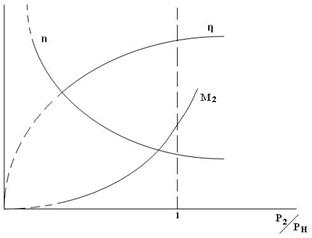
Рис. 40 Рабочие характеристики ДПТ последовательного возбуждения
Все остальные рабочие характеристики подобны аналогичным характеристикам двигателя независимого возбуждения, только диапазон изменения тока якоря, потребляемой мощности и моментов для сериесных двигателей меньше (рисунок 40) (2).
Вопросы для самоконтроля.
эксплуатационных параметров меньше? (2)
Раздел третий. Информационные электрические машины
П1. Классификация информационных микромашин
Три группы микромашин часто объединяют в класс информационных микромашин :
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.