Ошибки определения элементов
ориентирования исходной модели и систематические ошибки ![]() соединения моделей (второе и
третье слагаемое формул (9.15)) приводят к деформации маршрутной сети, которая
с учетом переноса начала координат описывается алгебраическими
полиномами вида
соединения моделей (второе и
третье слагаемое формул (9.15)) приводят к деформации маршрутной сети, которая
с учетом переноса начала координат описывается алгебраическими
полиномами вида
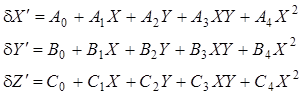 (9.16)
(9.16)
Если при выводе зависимостей (9.15) сохранить члены второго порядка малости ряда разложения тригонометрических функций, то деформация сети будет характеризоваться уравнениями вида:
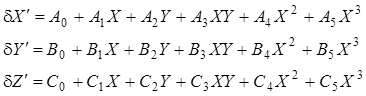 (9.17)
(9.17)
Коэффициенты ![]() ,….
,….![]() ,
, ![]() ,….
,….![]() ,
, ![]() ,….
,….![]() зависят от ошибок элементов
ориентирования моделей маршрутной сети.
зависят от ошибок элементов
ориентирования моделей маршрутной сети.
Для более полного учета
влияния кривизны Земли в уравнения (9.16)и (9.17) можно ввести дополнительные
слагаемые ![]() ,
,
![]() ,
, ![]() .
.
§79. Внешнее ориентирование и уравнивание маршрутной сети интерполяционным способом
Уравнения (9.16) и (9.17) описывают деформацию маршрутной сети, обусловленную систематическими погрешностями ее построения. Из выражения (9.15) видно, что деформация сети вызывается также и случайными погрешностями ее построения. Совместное действие этих погрешностей приводит к сложной деформации, уравнения которой могут быть установлены только при наличии достаточно большого числа равномерно расположенных опорных точек или при наличии истинных элементов внешнего ориентирования снимков.
На основании экспериментальных исследований и производственных работ установлено, что в сетях пространственной фототриангуляции случайные погрешности элементов ориентирования в результате их двойного суммирования (последнее слагаемое уравнений (9.15)) также приводят к относительно закономерной деформации. Так, при многократном построении сети по одним и тем же снимкам на одном и том же приборе и одним и тем же исполнителем величина ее прогиба меняется, но его изменение при переходе от модели к моделе по заданному направлению происходит по плавной кривой. Такой характер изменения деформации сети позволяет использовать для ее учета уравнения (9.16) и (9.17).
Схемы расположения опорных точек при уравнивании маршрутной сети по формулам (9.16) показаны на рис. 9.3., а по формулам (9.17) – на рис.9.4.
Уравнивание координат ![]() производится раздельно. Для
уравнивания маршрутной сети сначала необходимо привести геодезическую систему
координат
производится раздельно. Для
уравнивания маршрутной сети сначала необходимо привести геодезическую систему
координат ![]() в
соответствие с фотограмметрической системой
в
соответствие с фотограмметрической системой ![]() . Затем по формулам преобразования координат
геодезические координаты перевычисляются в фотограмметрическую систему
координат. Масштаб преобразования и элементы ориентирования находятся по
координатам минимум трех опорных точек, расположенных на исходной модели сети.
Элементы ориентирования находятся аналитическим путем. Имея условные
геодезические
. Затем по формулам преобразования координат
геодезические координаты перевычисляются в фотограмметрическую систему
координат. Масштаб преобразования и элементы ориентирования находятся по
координатам минимум трех опорных точек, расположенных на исходной модели сети.
Элементы ориентирования находятся аналитическим путем. Имея условные
геодезические ![]()
![]() и
фотограмметрические
и
фотограмметрические ![]()
![]() координаты
опорных точек, находят невязки и составляют три системы уравнений поправок,
например, вида:
координаты
опорных точек, находят невязки и составляют три системы уравнений поправок,
например, вида:
![]() ,
,
![]() ,
,
![]() .
.
Число уравнений, входящих в каждую систему, определяется числом используемых опорных точек.
Решая отдельно каждую систему уравнений поправок при условии ![]() , находят коэффициенты
, находят коэффициенты ![]() .
.
Уравненные координаты точек маршрутной сети вычисляются по формулам:
![]()
![]()
![]()
Полученные координаты точек фотограмметрического сгущения затем преобразуются в геодезические координаты. Для этого их приводят в соответствие с геодезической системой. Элементы внешнего ориентирования находят по координатам опорных точек.
Описанный способ уравнивания маршрутной фототриангуляции называется интерполяционным способом.
Если фотограмметрическая сеть
имеет значительную длину, простираясь в нескольких зонах системы координат
Гаусса, то для ее внешнего ориентирования и уравнивания используют координаты опорных
точек в прямоугольной промежуточной системе координат ![]() (§ 14
учебного пособия
«Фотограмметрия», СПб 2006г.). Координаты точек
в этой системе получаются путем преобразования их координат в геоцентрической
системе, которые в свою очередь находятся путём преобразования координат Гаусса
по формулам, известным из курса высшей геодезии.
(§ 14
учебного пособия
«Фотограмметрия», СПб 2006г.). Координаты точек
в этой системе получаются путем преобразования их координат в геоцентрической
системе, которые в свою очередь находятся путём преобразования координат Гаусса
по формулам, известным из курса высшей геодезии.
§80. точность пространственной фототриангуляции
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.