§78. уравнения искажений координат точек свободной маршрутной сети пространственной фототриангуляции
Маршрутные сети пространственной фототриангуляции в процессе их построения деформируются. Деформация маршрутной сети вызывается ошибками снимка, прибора и наблюдателя.
В аналоговой, аналого-цифровой и в аналитической (способ моделей) элементарным звеном является одиночная модель. Совместное влияние различных источников ошибок приводит к искажению координат точек одиночных моделей и погрешностям определения относительных элементов внешнего ориентирования, посредством которых одиночные модели объединяются в модель маршрута.
Погрешности определяемых элементов ориентирования состоят из двух частей: систематической и случайной. К основным источникам погрешностей, вызывающих систематические искажения элементов ориентирования, относится дисторсия объектива АФА, невыравнивание пленки в плоскость в момент экспозиции, деформация пленки, рефракция, кривизна поверхности Земли, клинообразность светофильтра и т.д. Случайная часть искажений вызывается случайным отклонением пленки от плоскости в момент фотографирования, отклонением расположения точек ориентирования от стандартной схемы, ошибками опознавания точек ориентирования на смежных моделях и ошибками наблюдений.
Вывод уравнений искажений координат точек выполним для свободной сети пространственной фототриангуляции, построенной путем образования одиночных моделей и соединения их в модель маршрута.
Примем, что построение
одиночных моделей и их соединение в маршрутную сеть выполнено безошибочно. Тогда
условные геодезические координаты ![]()
![]() точки маршрутной сети вычисляются по формулам:
точки маршрутной сети вычисляются по формулам:
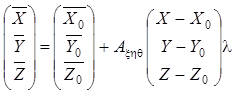 (9.13)
(9.13)
где
![]() ,
, ![]() ,
, ![]() и
и ![]() - условые
геодезические и фотограмметрические координаты опорной точки исходной модели,
принятой за начало координат;
- условые
геодезические и фотограмметрические координаты опорной точки исходной модели,
принятой за начало координат; ![]() - фотограмметрические координаты точки сети;
- фотограмметрические координаты точки сети; ![]() -условные элементы внешнего
ориентирования (модели) сети;
-условные элементы внешнего
ориентирования (модели) сети; ![]() - матрица преобразования координат
- матрица преобразования координат ![]() в систему координат
в систему координат ![]() ,
, ![]() ,
, ![]() ;
; ![]() - масштабный коэффициент
(модели) сети.
- масштабный коэффициент
(модели) сети.
Численные значения элементов
матрицы ![]() рассчитываются через углы
рассчитываются через углы ![]() .
.
Однако в действительности процесс создания моделей и присоединения каждой последующей модели к предыдущей сопровождается погрешностями, приводящими к постепенному изменению их элементов ориентирования.
Обозначим элементы
ориентирования ![]() -ой
модели
-ой
модели ![]() через
через ![]() а матрицу преобразования
а матрицу преобразования ![]() через
через ![]() . Тогда пространственные
координаты точки
. Тогда пространственные
координаты точки ![]() -ой
модели маршрутной сети в системе координат исходной модели определяют по
формулам:
-ой
модели маршрутной сети в системе координат исходной модели определяют по
формулам:
 , (9.14)
, (9.14)
где
![]()
![]() координаты
координаты ![]() го центра проекции
го центра проекции ![]() ой модели маршрутной; X, Y, Z –
координаты точки, расположенной в i-ой модели маршрутной сети.
ой модели маршрутной; X, Y, Z –
координаты точки, расположенной в i-ой модели маршрутной сети.
Параметры ![]() начальной и
начальной и ![]() -ой модели связаны с их
истинными значениями
-ой модели связаны с их
истинными значениями ![]() зависимостями:
зависимостями:
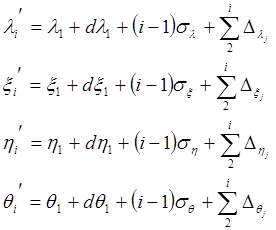 где
где
![]() ,
, ![]() - соответственно
систематическая и случайная составляющие погрешности одной передачи элемента ориентирования
модели;
- соответственно
систематическая и случайная составляющие погрешности одной передачи элемента ориентирования
модели;
![]() ,
, ![]() ,
, ![]() ,
, ![]() - случайные погрешности определения параметров
- случайные погрешности определения параметров ![]() ,
, ![]() ,
, ![]() и
и ![]() начальной модели.
начальной модели.
Очевидно, что разности
координат ![]() -
-
![]() ,
, ![]() -
- ![]() ,
, ![]() -
- ![]() точки маршрутной сети
представляют собой истинные ошибки ее положения в плане и по высоте. Обозначив
эти ошибки соответственно через
точки маршрутной сети
представляют собой истинные ошибки ее положения в плане и по высоте. Обозначив
эти ошибки соответственно через ![]() ,
, ![]() ,
, ![]() и учтя выражения (9.13),(9.14) и значение элементов ориентирования
и учтя выражения (9.13),(9.14) и значение элементов ориентирования ![]() , после разложения
тригонометрических функций в ряд с сохранением членов первого порядка малости
запишем:
, после разложения
тригонометрических функций в ряд с сохранением членов первого порядка малости
запишем:
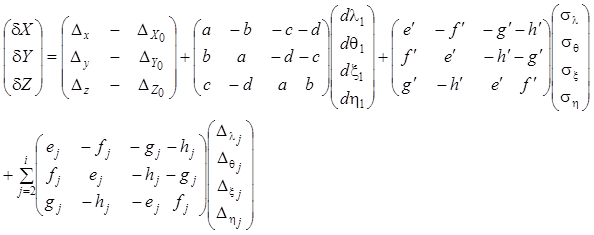 (9.15)
(9.15)
где
![]() ,
, ![]() ,
, ![]() и
и ![]() ,
, ![]() ,
, ![]() - погрешности измерения
координат соответственной точки
- погрешности измерения
координат соответственной точки ![]() -ой модели и точки исходной модели, принятой за
начало координат.
-ой модели и точки исходной модели, принятой за
начало координат.
Коэффициенты ![]() ,
, ![]() ,
, ![]() ,… вычисляются из выражений:
,… вычисляются из выражений:
![]() ,
, ![]() ,
, 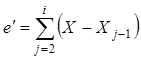 ,
,
![]() ,
, ![]() .
.  ,
,
![]() ,
, ![]() ,
,  ,
,
![]()
Ошибки записаны в масштабе построения маршрутной сети.
Уравнение (9.15)
характеризуют деформацию координат точек маршрутной сети, вызванную совместным
действием погрешностей определения элементов ориентирования исходной модели и
систематическими![]() и случайными
и случайными ![]() ошибками
ее построения.
ошибками
ее построения.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.