Первый вариант способа
моделей. Для
построения одиночных моделей используются плоские координаты ![]() соответственных точек пар
снимков и их элементы взаимного ориентирования в системе координат, ось X
которой совмещена с базисом фотографирования, а плоскость
соответственных точек пар
снимков и их элементы взаимного ориентирования в системе координат, ось X
которой совмещена с базисом фотографирования, а плоскость ![]() - с главной базисной
плоскостью левого снимка (первая система ЭВзО). Элементы взаимного
ориентирования
- с главной базисной
плоскостью левого снимка (первая система ЭВзО). Элементы взаимного
ориентирования ![]() ,
,
![]() ,
, ![]() определяются аналитическим
способом.
определяются аналитическим
способом.
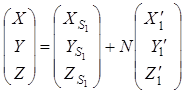
Пространственные фотограмметрические координаты точек каждой модели с учетом принятой системы координат находятся по формулам:
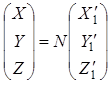 , (9.8)
, (9.8)
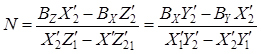
где
 ,
,
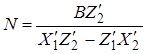
Пространственные координаты X', Y', Z' точек снимков каждой стереопары определяются по координатам x, y точек снимков и элементам взаимного ориентирования.
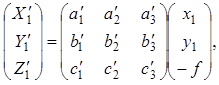 (9.9)
(9.9)
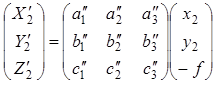
Направляющие косинусы
выражений (9.9) являются функциями углов ![]() и
и ![]() и вычисляются из их
уравнений (33) учебного пособия. Длина базиса
фотографирования В выбирается произвольно. Положение двух смежных
моделей маршрута иллюстрируется рис.9.1.
и вычисляются из их
уравнений (33) учебного пособия. Длина базиса
фотографирования В выбирается произвольно. Положение двух смежных
моделей маршрута иллюстрируется рис.9.1.
Присоединение каждой
последующей модели к предыдущей осуществляется с помощью координат одноименных
связующих точек С и центров проекций ![]() . Для каждой модели начало координат совмещено с
левым центром проекции
. Для каждой модели начало координат совмещено с
левым центром проекции ![]() .
Координаты правого центра проекции в этой системе координат имеют следующие
значения:
.
Координаты правого центра проекции в этой системе координат имеют следующие
значения: ![]()
![]() . Координаты связующих точек С
находятся по формулам связи между координатами точки местности и снимка (формула 9.8). Имея координаты точек
. Координаты связующих точек С
находятся по формулам связи между координатами точки местности и снимка (формула 9.8). Имея координаты точек ![]() , вычисляют для смежных
моделей семь элементов внешнего ориентирования. Перевычисление координат точек
второй и каждой последующей модели в систему координат и масштаб исходной
выполняется по формулам пространственного преобразования координат. Таким
образом строится свободная сеть пространственной фототриангуляции в системе
координат и масштабе исходной модели.
, вычисляют для смежных
моделей семь элементов внешнего ориентирования. Перевычисление координат точек
второй и каждой последующей модели в систему координат и масштаб исходной
выполняется по формулам пространственного преобразования координат. Таким
образом строится свободная сеть пространственной фототриангуляции в системе
координат и масштабе исходной модели.
Второй вариант способа
моделей. Для
построения одиночных моделей используются координаты соответственных точек пар
снимков и их условные элементы внешнего ориентирования, определенные в единой
системе координат. Сначала по измеренным координатам и параллаксам точек
ориентирования вычисляют ЭВзО всех пар снимков маршрута. Элементы внешнего
ориентирования левого снимка первой модели выбирают произвольно, т.е. задают
равными ![]() (для плановых снимков можно
принять
(для плановых снимков можно
принять ![]() . Элементы внешнего
ориентирования правого снимка первой модели вычисляют по формулам через
элементы внешнего ориентирования исходного снимка и ЭВзО. Для второй модели
элементы внешнего ориентирования левого снимка известны, а элементы внешнего
ориентирования правого снимка находят аналогичным образом. Так же вычисляют ЭВО
снимков всех последующих моделей.
. Элементы внешнего
ориентирования правого снимка первой модели вычисляют по формулам через
элементы внешнего ориентирования исходного снимка и ЭВзО. Для второй модели
элементы внешнего ориентирования левого снимка известны, а элементы внешнего
ориентирования правого снимка находят аналогичным образом. Так же вычисляют ЭВО
снимков всех последующих моделей.
Дирекционные углы ![]() и углы наклона
и углы наклона ![]() базисов определяются через
ЭВО и ЭВзО левого снимка каждой модели.
базисов определяются через
ЭВО и ЭВзО левого снимка каждой модели.
Имея углы ![]() базисов фотографирования и
условные элементы внешнего ориентирования всех снимков маршрута, можно найти
пространственные координаты центров проектирования и точек моделей.
базисов фотографирования и
условные элементы внешнего ориентирования всех снимков маршрута, можно найти
пространственные координаты центров проектирования и точек моделей.
Координаты правого центра проектирования определяют по формулам:
![]() , (9.10)
, (9.10)
где
![]() ,
, ![]() ,
, ![]() (9.11)
(9.11)
В формулах (9.10) и (9.11) ![]() - координаты левого центра
проектирования; В – базис фотографирования.
- координаты левого центра
проектирования; В – базис фотографирования.
Координаты точек первой и последующих моделей вычисляются по формулам:
 (9.12)
(9.12)
где
![]() - пространственные координаты
точки снимка.
- пространственные координаты
точки снимка.
Составляющие ![]() базисов фотографирования
всех пар снимков вычисляют по приближенному значению базиса В. Поэтому
каждая модель будет построена в произвольном масштабе. Приведение масштаба
каждой последующей модели к масштабу предыдущей осуществляется аналитическим
путем по координатам одноименных связующих точек и центров проектирования. В
результате будет построена свободная маршрутная
сеть в масштабе и системе координат исходной модели. Начало системы координат совмещено с левой точкой
фотографирования модели.
базисов фотографирования
всех пар снимков вычисляют по приближенному значению базиса В. Поэтому
каждая модель будет построена в произвольном масштабе. Приведение масштаба
каждой последующей модели к масштабу предыдущей осуществляется аналитическим
путем по координатам одноименных связующих точек и центров проектирования. В
результате будет построена свободная маршрутная
сеть в масштабе и системе координат исходной модели. Начало системы координат совмещено с левой точкой
фотографирования модели.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.