Перепишем полученное линейное уравнение, обозначив частные производные буквами a, b, …, и перейдя от дифференциалов dx, dy к поправкам dx, dy.
![]() , где
, где
![]() , причем uизм – измеренное
значение элемента сети u, а du - поправка к результату измерения.
, причем uизм – измеренное
значение элемента сети u, а du - поправка к результату измерения.
Получили уравнение поправок:
![]()
Перепишем его в более привычном виде
![]() (2.5)
(2.5)
Наличие в сети ![]() измеренных элементов приводит к системе
измеренных элементов приводит к системе ![]() уравнений
поправок
уравнений
поправок
 (2.6)
(2.6)
В геодезических сетях число измерений ![]() всегда
больше числа
всегда
больше числа ![]() неизвестных.
неизвестных.
Из-за ошибок измерений система уравнений (2.6) оказывается несовместной и решают ее методом наименьших квадратов.
То есть, вместо невозможного
vi = 0 (i = 1, 2, …,n)
добиваются минимума целевой функции
[v2] = min.
При неравноточных измерениях веса pi уравнений неодинаковы и целевой функцией является
[pv2] = min.
Производные  могут быть вычислены численным методом, но чаще их
определяют по известным формулам.
могут быть вычислены численным методом, но чаще их
определяют по известным формулам.
Примеры.
Уравнение поправок для измеренного расстояния.
Напишем уравнение связи для расстояния между пунктами i и j.
s2 = (xj –xi)2 + (yj – yi)2.
Продифференцируем его по всем переменным
2s ds = 2 (xj –xi) (dxj – dxi) + 2 (yj – yi) (dyj – dyi).
Перейдем к поправкам и учтем, что Dx / s = cosaи Dy / s = sina. Получим
cosaji dxi + sinaji dyi + cosaij dxj + sinaij dyj = ds .
Учтем, что
ds = s – s0 = sизм + vs – s0 , и получим окончательно
cosaji dxi + sinaji dyi + cosaij dxj + sinaij dyj + (sизм - s0) = vs . (2.7)
Уравнение поправок для измеренного дирекционного угла.
Напишем уравнение связи
 .
.
Дифференцируя его, напишем
cosaij (xj - xi) da + sinaij dxj - sinaij dxi = - sinaij (yj - yi)da + cosaijdyj
-cosaijdyi.
Разделим полученное уравнение на расстояние s и учтем, что
cosaij (xj - xi) + sinaij (yj - yi) = s.
Получим
 (2.8)
(2.8)
Учтем, что
daij = aij - aij0 = aijизм + va- aij0 , и получим окончательно

Уравнение поправок для измеренного горизонтального направления.
Пусть на некотором пункте измерены горизонтальные направления. Дирекционный угол любого из них равен
a = b + R, (2.9)
где
![]() -
направление, отсчитываемое от начального направления, дирекционный угол
которого равен R.
-
направление, отсчитываемое от начального направления, дирекционный угол
которого равен R.
Для приближенных значений тех же элементов, вычисленных по приближенным координатам, напишем
a0 = b 0+ R0, (2.10)
Заменяя же в (2.9) истинные элементы уравненными, напишем
a0 + da = bизм + vb + R0 + dR, (2.11)
Вычтя (2.10) из (2.11), получаем
da = dR - (b 0 - bизм) + vb.
Заменим теперь в (2.8) поправку к дирекционному углу da последним выражением. Получим уравнение поправок горизонтального направления.

2.5. Зависимость математической модели геодезической сети от гипотезы о характере ошибок измерений.
Чтобы математическая модель геодезической сети была адекватна объекту, адекватна реальной, созданной с помощью измерений сети, построенная модель должна верно отражать все существенные стороны выполненных измерений. Покажем, что существенными являются не только значения измеренных элементов, но и характер погрешностей измерений.
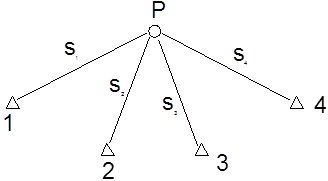
Рассмотрим это на примере определения координат пункта
![]() линейной
засечкой с 4-х пунктов (см. рис.).
линейной
засечкой с 4-х пунктов (см. рис.).
Исходными данными являются:
-
координаты ![]() пунктов: 1,
2, 3, 4;
пунктов: 1,
2, 3, 4;
-
результаты измерения расстояний: ![]()
Зададимся приближенными координатами пункта Р и построим математическую модель в виде системы уравнений поправок.
Оказывается, модель неоднозначна и зависит от гипотезы о характере ошибок измерений.
Рассмотрим варианты, соответствующие разным гипотезам.
Гипотеза 1. Предполагаем, что результаты измерения расстояний s1, s2, s3, s4 содержат только случайные ошибки. Уравнения поправок имеют вид:
![]() (i = 1, 2, 3, 4)
(i = 1, 2, 3, 4)
здесь
![]() - поправки к
рензультатам измерений, призванные устранить, а точнее – ослабить, случайные
ошибки.
- поправки к
рензультатам измерений, призванные устранить, а точнее – ослабить, случайные
ошибки.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.