Выходя из того, что физиологичные и биохимические показатели организма каждого человека могут значительно отличаться, невозможно предложить эффективную ГДС без использования бионического подхода, то есть возможности адаптации таких условий. Структурная схема такой БТС приведена на рис. 4.20. В отличии от ГДС разомкнутого типа в БТС врач–оператор не выступает как звено оптимизации в процессе гемодиализа, а лишь как эксперт.
Функции эксперта, при параметрах вектора управления конкретно для каждого пациента:
- предварительный расчет данных для математической модели объекта управления;
- введение данных расчета в устройство управления БТС;
- контроль эффективности проведения гемодиализа на этапе адаптации модели для конкретного индивида;
- коррекция начальных данных в случае несоответствия эффективности процесса (индивидуализация математической модели объекта управления);
- вмешательство в работу БТС в случае возникновения нештатной ситуации.
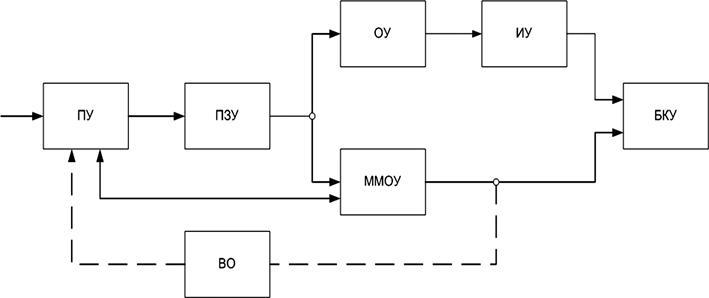
ПУ – прибор управления; ПЗУ – преобразователь законов управления; ВО – врач–оператор; ОУ – объект управления; ММОУ – математическая модель объекта управления; ИП – измерительный прибор; БКУ – блок коррекции управления.
Рис. 4.20 – Структурная схема БТС коррекции гомеостаза
Включения математической модели и измерительного прибора позволяет за счет текущего изменения вектора управления модели корректировать закон управления и соответственно управлять сигналами. Характерными чертами при условии работы такой системы является:
- индивидуализация математической модели;
- управляемые сигналы после начала управления поступают параллельно как к объекту управления, так и к его математической модели;
- осуществляется непрерывная коррекция управляющих сигналов за счет наличия обратной связи через прибор измерения;
- управление осуществляется до совпадения текущего значения вектора, состояния математической модели объекта управления с вектором заданных значений.
4.7. Определение критерия оптимального управления в гемодиализной системе
Задача оптимального управления в теории автоматического управления формулируется как достижение экстремума некоторого функционала Q – критерия оптимума системы:
![]() , (4.19)
, (4.19)
где х – вектор, описывающий состояние системы; w – вектор, определяющий входные воздействия; и – вектор, определяющий управляющие воздействия; t – время.
Если на воздействия и, наложены ограничения, например, задана область их допустимых изменений Ωи, то максимум в (4.19) определяется по условию ограничения как
![]() . (4.20)
. (4.20)
Другими словами, задачу оптимального управления, можно сформулировать следующим образом: необходимо определить параметры вектора управления u(t), принимающего значения из множества допустимых управлений U, которые переводят объект, описываемый системой
 , (4.21)
, (4.21)
из положения x(t0)= х в положение x(tjj = t1) с максимальным значением критерия качества.
Критерий оптимальности J в ГДС определим как
 , (4.22)
, (4.22)
где X(tj),V(tj) – значения концентрации токсичной жидкости и общего объема жидкости, рассчитанных при помощи математической модели; V – значения концентрации токсического вещества и общего объема измеряемой жидкости; j – параметр, по которому проводится оптимизация.
При условии оптимального управления в ГДС необходимо иметь количественные значения диапазона изменения параметров вектору управления. Но зависимость этих параметров от многих факторов требует громоздких расчетов. Поэтому определим их посредством компьютерного моделирования.
Контрольные вопросы
1. Какие задачи решает гемодиализная аппаратура?
2. Какие виды гемодиализа применяют в медицине?
3. Чем отличается аппарат «искусственная почка» от аппаратов гемодиализа?
4. Что такое клиренс гемодиализной аппаратуры?
5. Какие задачи решают моделированием при гемодиализе?
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.