12.5. УПРАВЛЕНИЕ ПРОМЫШЛЕННЫМИ РОБОТАМИ
Существуют два типа управления роботами с помощью ПК: управление в централизованном режиме и непосредственное управление. Рассмотрим особенности обоих типов управления.
Управление роботами в централизованном режиме. ПУ могут использоваться для централизованного управления оборудованием автоматизированного производственного процесса. В состав этого оборудования входит и робот. ПК управляет роботом по программе, обеспечивая выполнение последовательности операций в заданные моменты времени. ПК может также контролировать различные функции, взаимодействие с технологическим оборудованием, отклонение условий от нормальных или выявлять условия,
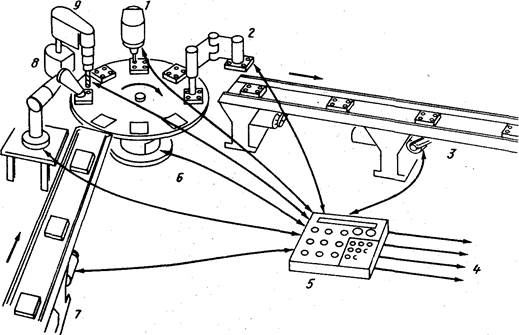
Рис. 12.25
Централизованное управление с помощью ПК автоматизированным производственным процессом с использованием промышленных роботов:
1 — инструмент для автоматической сборки; 2—станция роботизированной разгрузки-3 — привод разгрузочного конвейера; 4 — к другому производственному оборудованию-5- ПК; 6 — поворотный индексируемый механизм; 7 — привод подающего конвейера;
8 - роботизированная станция загрузки; 9 — станок приводящие к аварийной ситуации. При этом ПК осуществляет управление в соответствии с результатами контроля. При управлении промышленными роботами в централизованном режиме кроме центрального ПК робот оснащен автономным специализированным устройством управления, которое обеспечивает управление перемещениями рабочих органов робота в соответствии с программой. Однако на ПК могут быть возложены более широкие функции по сравнению с автономным устройством управления робота, как это видно из схемы, представленной на рис. 12.25.
Непосредственное управление роботами. ПК могут применяться не только в качестве устройств связи и синхронизации функционирования роботов с производственным оборудованием, но и для непосредственного управления роботом. Вид панели управления серийно выпускаемым роботом показывает, что во многих случаях в качестве устройства управления роботом используется ПК. ПК представляют собой идеальное средство для обеспечения простейших перемещений рабочих органов роботов. Наиболее часто ПК используются с пневматическими роботами типа взять-положить. С учетом информации, приведенной в гл. 2, 7, 10—12, можно создать собственный робот типа взять-положить с использованием пневмоцилиндров, золотников и конечных выключателей. Ниже рассмотрены два примера роботов
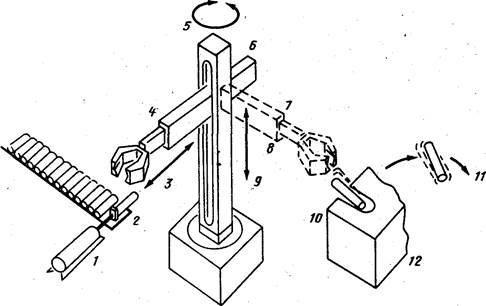
Рис. 12.2в
Простой робот типа взять-положить, оснащенный ПК:
1 — устройство подачи деталей; 2 — позиция захвата; 3 — отвод; 4 — позиция руки для поворота по часовой стрелке; 5 — поворот по часовой стрелке; 6 — поворот против часовой стрелки; 7 — позиция руки для поворота против часовой стрелки; 8 — подъем; 9 — опускание; 10 — позиция для укладывания детали;
11 — автоматическое удаление деталей; 12 — станция обработки типа взять-положить. В одном примере использовано управление в функции времени без обратной связи, во втором — управление с обратной связью.
12.6. ПРЕИМУЩЕСТВА ПК
До сих пор все системы управления производственным оборудованием, рассмотренные в примерах, приведенных в гл. 10—12, могли быть выполнены с использованием отдельных логических компонентов или реле, описанных в гл. 2. Однако настройка ПК на выполнение тех же функций имеет ряд очевидных преимуществ, на которые целесообразно обратить внимание специалистам по робототехнике и автоматизации.
Гибкость. Наиболее существенным преимуществом ПК в сравнении с обычными релейными схемами является легкость, с которой логика системы может быть изменена, иными словами гибкость ПК. Как только происходит смена выпускаемой модели, производится переналадка на новую партию изделий или принимается решение для изменения стратегии управления, программное обеспечение ПК может быть изменено за считанные минуты. При этом не требуется никакого пересоединения проводников или изменения прокладки последних, а также замены каких-либо компонентов технических средств. В этом заключается классическое различие между изменениями в программном обеспечении и аппаратном обеспечении.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.