Содержание
Введение........................................................................................ 3
1 Двухколесный робот.......................................................... 5
1.1 Обзор....................................................................................... 5
1.2 Соревнования роботов......................................................... 10
1.3 Конструкция робота........................................................... 13
2 Статический расчет системы................................... 19
2.1 Привод................................................................................... 19
2.2 Масса..................................................................................... 21
2.3Момент инерции системы.................................................... 22
2.4 Датчик расстояния до пола................................................ 23
3 Динамический расчет системы.............................. 24
3.1 Функциональная схема......................................................... 24
3.2 Модель двухколесного робота-тележки............................ 25
а) Основная динамическая модель робота тележки.............. 25
б) Редуцированная модель робота-тележки......................... 26
в) Кинематическая модель робота-тележки........................... 28
3.3 Модель обратного маятника.............................................. 30
а) Структурная схема модели обратный маятник.................. 32
б) Модель обратного маятника в пакете Matlab Simulink..... 32
3.4 Регулятор горизонтального канала.................................... 33
3.5 Расчет регулятора вертикального канала........................ 34
4 Результаты моделирования....................................... 35
а) Вертикальный канал.............................................................. 35
б) Горизонтальный канал S....................................................... 36
в) Горизонтальный канал.......................................................... 36
Заключение............................................................................... 37
Список литературы.............................................................. 39
Приложение А........................................................................... 40
Приложение Б........................................................................... 49
Приложение В........................................................................... 50
Данная дипломная работа посвящена исследованию двухколесного мобильного робота. Для начала стоит поговорить о понятии робота в целом.
«Ро́бот— электромеханическое, пневматическое, гидравлическое устройство или их комбинация, предназначенное для замены человека в промышленности, опасных средах и др. Принятый сейчас во всём мире термин был изобретён чешским писателем Карелом Чапеком и его братом Йозефом и впервые использован в пьесе Чапека «Р.У.Р.» («Россумские универсальные роботы»,1921).»[1]
До появления настоящих роботов считалось само собой разумеющимся, что роботы будут похожи на людей. Промышленные роботы никогда не бывают похожи на людей, если при проектировании это не ставилось в качестве главной задачи.
Под чапекское определение робота подходит множество современных электронных устройств, в том числе, например, кухонный комбайн. Однако, обычно под роботами понимают только:
-Способные к автономному передвижению устройства (мобильные роботы; шагающие роботы; андроидные роботы; BEAM-роботы)
-Либо устройства, обладающие способностью совершать сложные манипуляционные действия (манипуляторы, в т.ч. космические; промышленные роботы , и т.п.)
Робот может непосредственно подчиняться командам оператора, работать по заранее составленной программе либо следовать набору общих указаний с помощью технологии искусственного интеллекта. Эти задачи позволяют облегчить или вовсе заменить человеческий труд на производстве, в строительстве, при работе с тяжёлыми грузами, вредными материалами, а также в других тяжёлых или небезопасных для человека условиях.
Для передвижения по открытой местности чаще всего используют колёсную или гусеничную, реже — шагающую систему передвижения роботов. Это самые универсальные виды систем перемещения. Пример робота с шагающей системой передвижения изображен на рисунке 1.
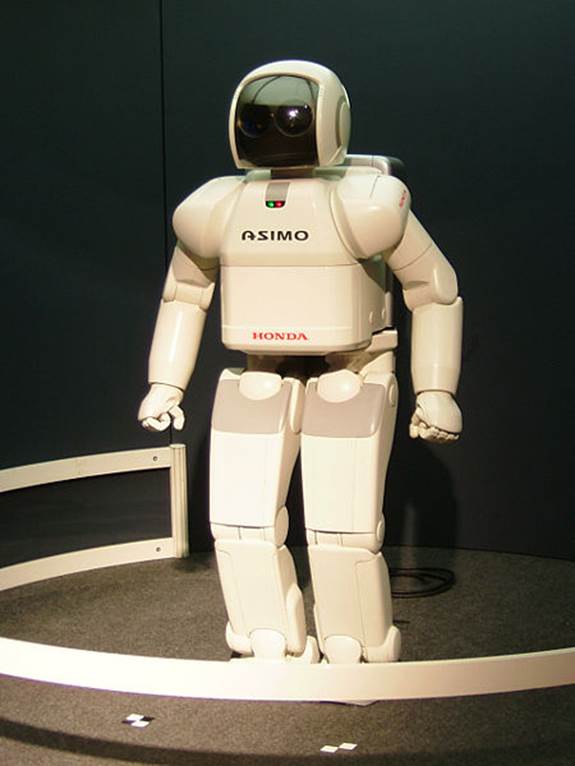
Рисунок 1. Робот-гуманоид ASIMO, производство Honda
Перед тем как приступить к исследованию рассмотрим несколько подобных конструкций, на базе которых мы и сможем реализовать поставленную задачу.
«Типичный колесный робот, например, Американская компания «MobileRobots» представила мобильный робот P3-DX (на рисунке 2). Мобильный робот представляет собой трехколесную платформу, снабженную независимыми электродвигателями правого и левого колеса.
Рисунок 2. (а) Внешний вид мобильного робота P3-DX; (б) мобильный робот P3-DX, вид сверху.»[2]
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.