 (6.00)
(6.00)
(6.01)
(6.02)
(6.03)
(6.04)
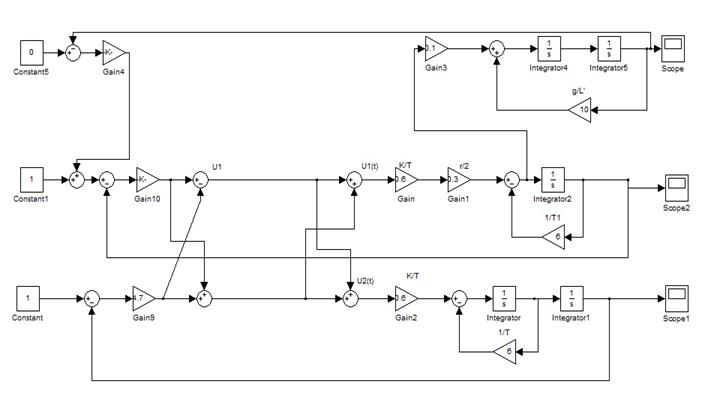
Получив данные построим модель регулятора горизонтального канала в Matlab Simulink.

Рисунок 26. Модель регулятора для горизонтального канала.

Рисунок 27. Регулятор модели обратный маятник.
Приступим к расчету регулятора вертикального канала по формулам:
 (7.01)
(7.01)
(7.02)
(7.03)
(7.04)
(7.05)
(7.06)
(7.07)
(7.08)
(7.09)
(7.10)
(7.11)
Смоделируем в Matlab Simulink, подставив полученные значения:

Рисунок 28. Модель регулятора вертикального канала.
4 Результаты моделирования.
Получив отдельно модели вертикального и горизонтального каналов, а также их регуляторы теперь можем построить объединенную модель[Рисунок 29]:
На выходе системы имеем 3 канала:
вертикальный ![]() отклонение
от вертикали, и два горизонтальных
отклонение
от вертикали, и два горизонтальных ![]() и
и ![]() угол отклонения и перемещение соответственно.
угол отклонения и перемещение соответственно.
Далее получим графики для каждого из каналов:
а) Вертикальный канал [Рисунок 30.]
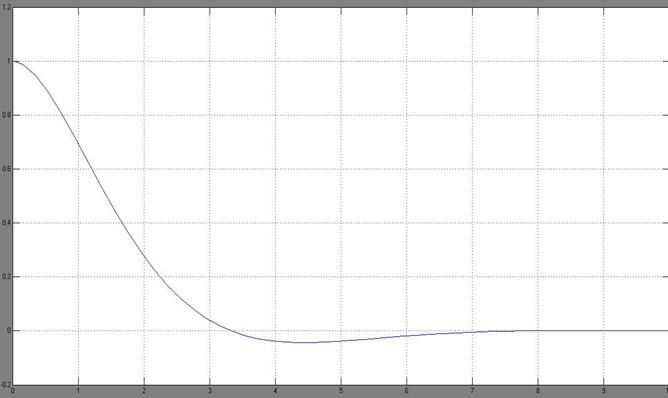
Рисунок 30. График переходного процесса вертикального канала.
б) Горизонтальный канал S [Рисунок 31.]
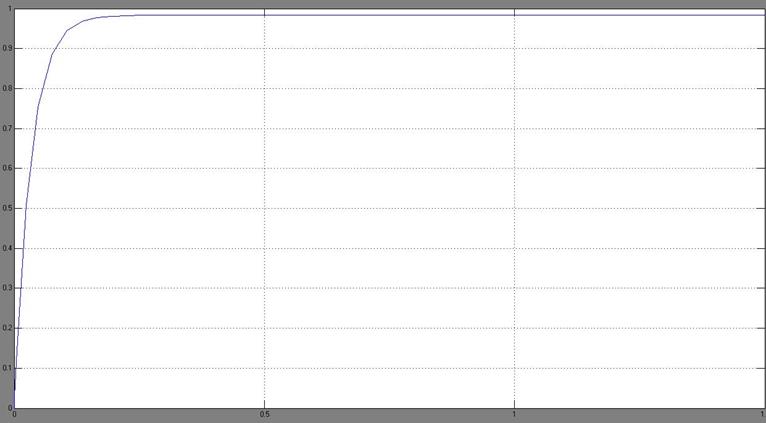
Рисунок 31. График переходного процесса перемещение мобильного робота.
в) Горизонтальный
канал ![]() [Рисунок 32.]
[Рисунок 32.]

Рисунок 32. График переходного процесса поворота тележки.
Заключение
Перед нами была поставлена задача придумать решение и исследовать двухколесного мобильного робота и теперь пришло время подвести итоги.
Был проведен обзор различных устройств мобильных роботов, удалось найти и технически идеальный вариант для решения поставленной задачи- это мобильный робот nBot, созданный профессором из Швеции Дэвидом Андерсоном. Но взять за основу его робот мы не смогли по многим причинам, во-первых его структура слишком сложна для изучения, плюс принцип действия основан на системе гироскопов, а стоимость мобильных гироскопов велика и использование столь сложной и дорогой модели для наших соревнований не рентабельно.
В результате поиска были выбраны две концепции: робот-тележка и обратный маятник.
Модель робот-тележка реализована на базе тележки с двумя колесами, каждое из которых имеет отдельный привод. Такая конструкция позволяет маневрировать за счет разности скорости вращения колес. Двухколесная конструкция имеет существенные преимущества по сравнению скажем с трех или четырехколесной. Но в таком случае существует проблема. Двухколесная тележка должна удерживать равновесие для того чтобы передвигаться. Для решения данной проблемы было решено использовать модель обратного маятника.
Модель, в нашем случае, представляет собой штангу, закрепленную у основания тележки. Условия соревнований мобильных роботов позволяют нам создать модель не превышающего в высоту 950мм, мы выбрали максимально возможную высоту. Такое решение основано на факте: чем длиннее ось- тем проще сбалансировать основание!
Далее был произведен расчет двигателя и редуктора, который оптимально подходит для нашей модели, решено было взять реверсивные двигатели постоянного тока производства компании Maxon (Приложение Б) с входным питанием 12 вольт и выходной мощностью 60 ватт. Двигатели имеют достаточно малый вес всего по 250гр. Затем был подобран редуктор оптимальный для движения нашего мобильного робота.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.