Таблица 1 Краткие характеристики двигателя постоянного тока Maxon RE30.
Далее необходимо подобрать планетарный редуктор, для того чтобы привод нашего мобильного робота имел линейные характеристики и скорость вращения колес была оптимальной.
Из списка рекомендуемых редукторов к данной модели двигателя выберем MaxonPlanetaryGearheadGP32CКраткие характеристики редуктора приведены в таблице 2:
|
Редукция |
411:1 |
|
КПД |
70 % |
|
Момент инерции |
0,7
гр/см |
|
Масса |
0,226 кг |
Таблица 2. Краткие характеристики редуктора.
Теперь, зная характеристики выбранного привода, мы можем произвести некоторые расчеты.
Зная скорость вращения вала двигателя, коэффициент редуктора и радиус колеса получим:
 (1.00)
(1.00)
Отсюда вычислим скорость робота:
![]() (1.01)
(1.01)
Далее посчитаем коэффициент передачи привода, который далее будет нам необходим для моделирования системы:
 (1.02)
(1.02)
Для того чтобы рассчитать момент инерции прежде всего следует поговорить о распределении масс в системе.
У основания оси находится два двигателя, два редуктора, массы которых нам известны, также 2 аккумулятора, нижняя площадка и колеса. Подсчитаем примерно суммарную массу в основании робота:
-Двигатель, 2шт 0,25кг
-Редуктор, 2шт 0,25кг
-Аккумулятор, 2шт 1кг
-Колесо, 2шт 0,25кг
-Площадка, 1шт 0,5кг
Масса при основании нашего робота равна 4кг.
В сумму масс на другом конце оси входят:
-Верхняя площадка
-«Глаза», 2шт
-Блок управления, 2шт
Примем сумму этих масс равной 0,5кг.
Массу самой оси, длина которой составляет 830мм примем также равной 0,5кг. Соотношение масс робота показано схематически на рисунке 12:

Рисунок 12. Соотношение масс балансирующего робота.
Для начала рассчитаем момент инерции, приложенный к оси:
 (2.01)
(2.01)
Затем найдем момент инерции верхней точки:
![]() (2.02)
(2.02)
И затем найдем момент инерции нижней площадки:
 (2.03)
(2.03)
Далее найдем суммарный момент инерции:
![]() (2.04)
(2.04)
Итак, теперь нам необходимо получить коэффициент передачи оптического датчика расстояния до пола. Отклонение робота изображено схематически на рисунке 13:
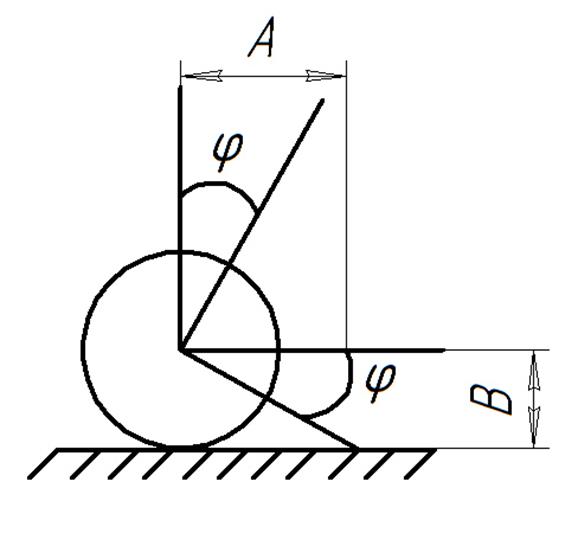
Рисунок 13. Отклонение робота
Из рисунка 13 нетрудно
видеть, что робот отклоняется на некоторый угол ![]() ,
и с помощью оптического датчика мы можем точно определять изменение расстояния,
которое обрабатывается микроконтроллером, а затем на привод поступает сигнал
для необходимой корректировки движения и стабилизации робота.
,
и с помощью оптического датчика мы можем точно определять изменение расстояния,
которое обрабатывается микроконтроллером, а затем на привод поступает сигнал
для необходимой корректировки движения и стабилизации робота.
А- расстояние от оси до датчика равно 150мм.
В- расстояние от пола до чувствительного элемента датчика 100мм.
![]() -
угол отклонения робота.
-
угол отклонения робота.
 (3.00)
(3.00)

Рисунок 14. Функциональная схема
На рисунке 14 используются следующие обозначения:
-МК (микроконтроллер)
-У (усилитель)
-ДВ (двигатель)
-Р (редуктор)
-Д1 («Глаза» робота)
-Д2 (Датчик расстояния до пола)
-Д3 (Датчики полосы. Предназначены для ориентирования робота на площадке с прочерченным маршрутом. Могут устанавливаться вместо «глаз», либо совместно, но совместное использование делает нашего робота универсальным. )
«Робот-тележка имеет два активных колесных модуля, которые расположены симметрично на оси Z2 и фиксированы параллельно оси Z1.[Рисунок 15]

Рисунок 15. Робот-тележка.
Далее рассмотрим структурные схемы моделей робота-тележки :

Рисунок 16. Основная динамическая модель
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.