В данной модели учитываются все факторы влияющие на движение тележки. На выходе данная модель имеет координаты( х, у) и угол поворота, а на входе подаются сигналы с приводов.
Как видно из рисунка 16 модель имеет достаточно громоздкую структуру это значительно усложняет расчеты а значит и увеличивается погрешность. Плюс ко всему часть данных которые учтены в этой модели очень не существенно влияют на систему, например поперечное проскальзывание, которое при значительном коэффициенте трения скольжения будет стремиться к нулю. Опустив проскальзывание можно перейти к редуцированной(упрощенной) модели.»[10]

Рисунок 17. Редуцированная модель
Итак, запишем уравнения справедливые для данной модели:
 (4.00)
(4.00)
(4.01)
(4.03)
(4.04)
(4.05)
(4.06)
Теперь можем записать уравнения для выхода системы:
 (4.07)
(4.07)
(4.08)
Из данных формул мы сможем перейти к кинематической модели системы управления роботом-тележкой.
За входные переменные примем скорости колес, а значит дифференцируя получим такие уравнения:
 (4.09)
(4.09)
(4.10)
Скорости колес связаны с управляющими воздействиями так:
 ,
где К – постоянный коэффициент. (4.11)
,
где К – постоянный коэффициент. (4.11)
Теперь можем записать все уравнения для кинематической модели робота-тележки:

![]() (4.00)
(4.00)
(4.01)
(4.12)
(4.13)
(4.14)
Получив все
данные, мы можем нарисовать структурную схему кинематической модели робота
тележки: 
Рисунок 18. Структурная схема модели робот-тележка.
Теперь построим модель с помощью пакета Simulink:

Рисунок 19. Кинематическая модель робота-тележки.
Поскольку данная модель в отличие от остальных наиболее оптимально подходит для решения нашей задачи, то именно ее мы и будем использовать.
"Ранее нами был рассмотрен принцип действия обратного маятника, ось которого закреплена на подвижной тележке. В нашем случае конструкция выглядит несколько иначе. Далее сравним существующую модель обратного маятника [Рисунок 21.] с нашей моделью для двухколесного мобильного робота[Рисунок 22.].
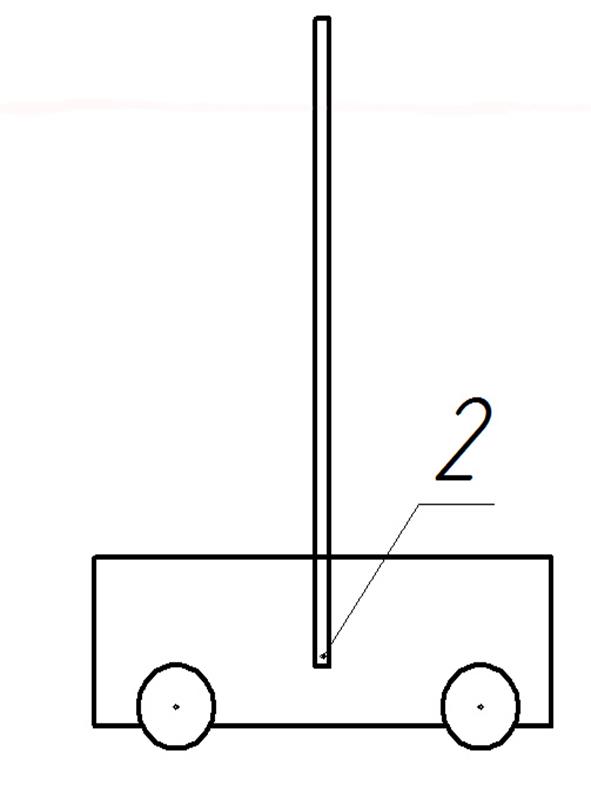
Рисунок 21. Обратный маятник.
Как видно из рисунка, маятник имеет степень свободы в точке 2, то есть относительно данной точки он и вращается.
А теперь посмотрим на модель нашего робота на рисунке 22:
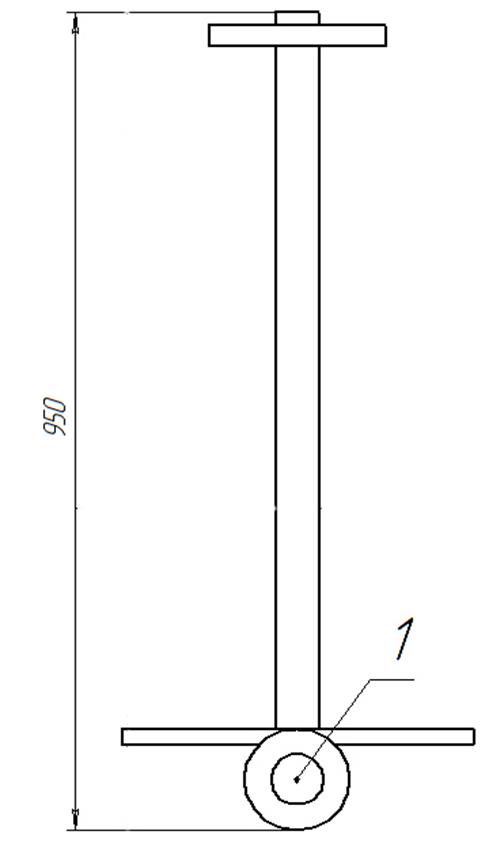
Рисунок 22. Обратный маятник
В точке «1» нашей модели и закреплен маятник, данная точка совпадает с осью колес мобильного робота. Нетрудно видеть, что в обоих случаях ось маятника закреплена в эквивалентных точках системы, а значит все законы справедливые для маятника на [Рисунке 21] будут также справедливы и для нашей модели, изображенной, на [Рисунке 22]. Далее приступим к моделированию:
|
 .
.
Рисунок 23. Структурная схема обратного маятника.
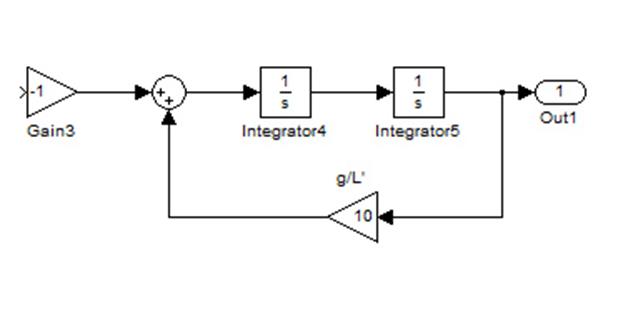
Рисунок 24. Обратный маятник
Построим регулятор для модели робот-тележка. На входе имеем 2 величины, задаваемые блоком управления- это скорость и угол, а на выходе необходимо получить путь и угол. Возьмем регулятор
Рисунок 25. Структурная схема регулятора горизонтального канала.
Далее произведем расчет по формулам:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.