Теперь, с учетом существующих аналогов и требований регламента соревнований, мы сможем разработать оптимальный вариант для решения поставленной задачи.
За основу можно взять робот P3-DX, но у него наблюдается явный недостаток. Робот имеет два ведущих колеса и третье (ведомое), это значительно снижает его маневренность, а для успешного участия в соревнованиях это крайне важно. Если у робота будет два колеса, а не три как у P3-DX, то он сможет поворачивать вокруг собственной оси, а значит и маневрировать по полигону намного быстрее своих трехколесных соперников.
Но если мы убираем третье колесо сразу же возникает серьезная проблема- такой робот становится неустойчивым.
Если посмотреть на подобные двухколесные модели роботов, то очевидно, что мы также можем использовать гироскоп для балансирования нашего робота. Но и у таких моделей есть недостаток. Главный минус в том, что у любого гироскопа есть погрешность и следовательно мы не сможем полностью исключить падений робота. Плюс ко всему реализовать подобную систему гироскопов, которая используется в самокатах SEGWAY, упомянутых ранее, очень сложно. И как последний аргумент не лишним будет упомянуть о цене мобильного гироскопа, стоимость самого простого варианта превышает 3 тысячи рублей, а максимально подходящий для нашего робота обойдется более чем в 10 тысяч рублей.
Отказавшись от использования гироскопа мы можем использовать более простую, и надежную систему. Для того чтобы наш мобильный робот не терял равновесия мы можем использовать модель перевернутого маятника. Рассмотрим перевёрнутый маятник, показанный на рисунке 9. Ось маятника монтируется на тележке, которая может перемещаться в горизонтальном направлении.

Рисунок 9. Обратный маятник.
«Тележка приводится в движение небольшим двигателем,
который в момент времени ![]() прикладывает к тележке силу m(t),
являющуюся входной переменной
системы. На рисунке 10 представлены силы и перемещения. В момент времени t перемещение
оси характеризуется функцией s(t), а угловое
отклонение маятника - функцией
прикладывает к тележке силу m(t),
являющуюся входной переменной
системы. На рисунке 10 представлены силы и перемещения. В момент времени t перемещение
оси характеризуется функцией s(t), а угловое
отклонение маятника - функцией ![]() . Масса
маятника обозначена буквой m, L- расстояние между осью и центром тяжести, J-
момент инерции относительно центра тяжести, M- масса
тележки. К маятнику приложена сила mg в центре тяжести, а также
горизонтальная H(t) и вертикальная
V(t) силы
реакции у оси маятника. Здесь g- ускорение силы тяжести.
. Масса
маятника обозначена буквой m, L- расстояние между осью и центром тяжести, J-
момент инерции относительно центра тяжести, M- масса
тележки. К маятнику приложена сила mg в центре тяжести, а также
горизонтальная H(t) и вертикальная
V(t) силы
реакции у оси маятника. Здесь g- ускорение силы тяжести.
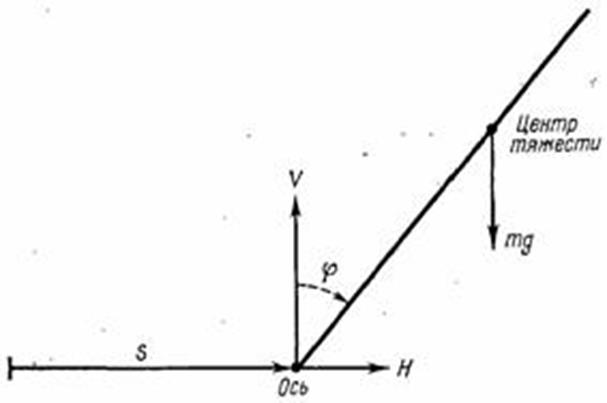
Рисунок 10. Обратный маятник. Силы и перемещения.»[9]
Условия соревнований позволяют нам сделать ось «маятника» достаточно длинной, а как известно чем выше ось, тем проще будет удержать равновесие такой конструкции.
А также в верхней части робота будут размещены стандартные «глаза» (фотодиоды, которые вращаются под действием микродвигателей и способные охватывать всю территорию вокруг робота). И блок управления роботом будет смещен к верхней части для того, чтобы центр тяжести системы оказался в середине оси.
В нижней части, на тележке будут размещены элементы питания, в качестве привода используем два двигателя постоянного тока, по одному на каждое колесо. Для того, чтобы наш мобильный робот мог удерживать равновесие за счет привода используем датчик расстояния до пола. То есть в случае отклонения робота расстояние до пола изменится и на двигатели поступит сигнал для движения в сторону наклона (балансировка).
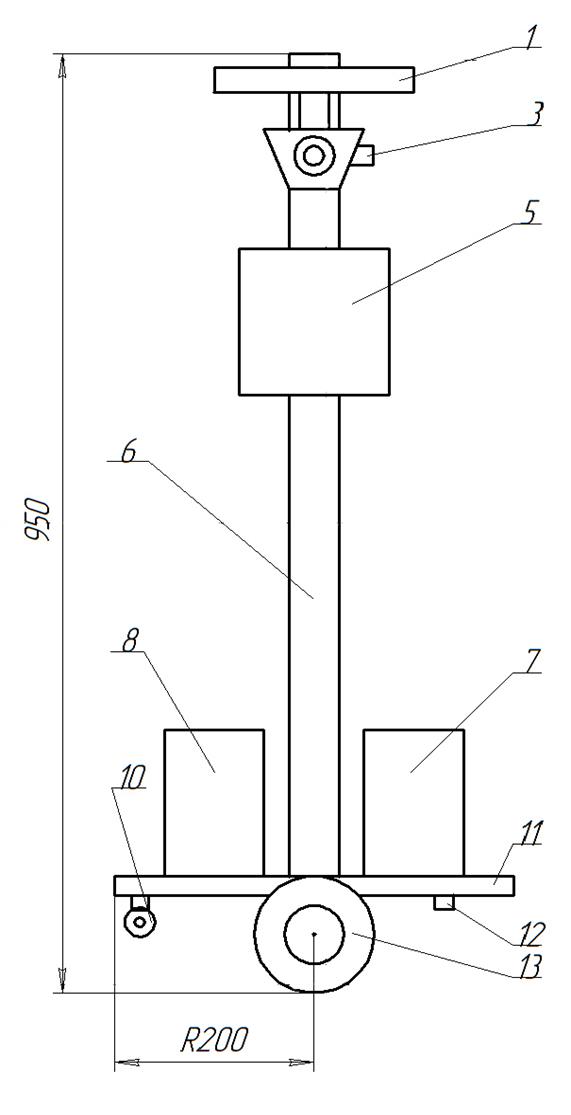
Рисунок 11(а) Конструкция двухколесного робота. Вид слева.
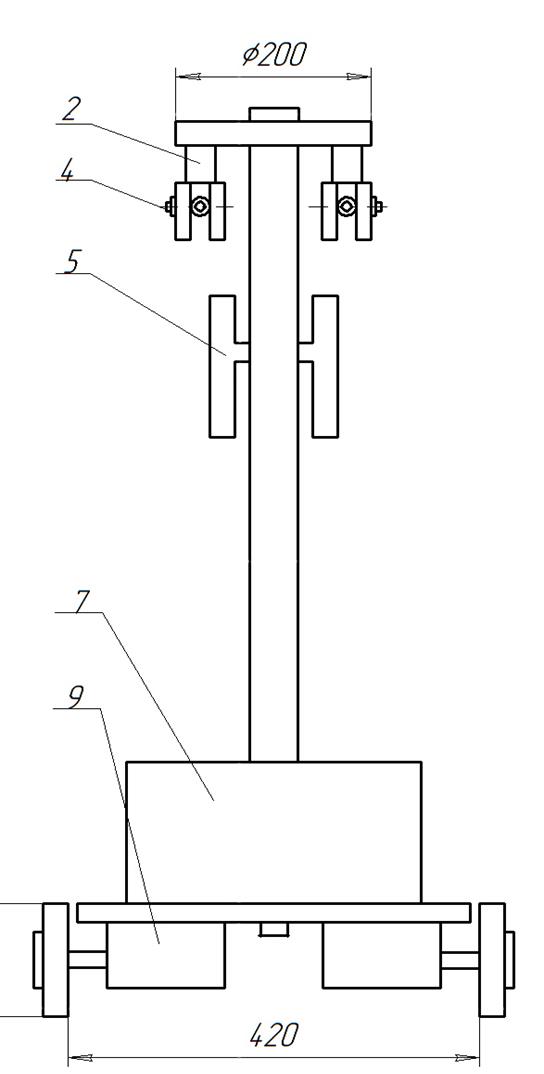
Рисунок 11(б). Конструкция двухколесного робота. Вид спереди.
Описание конструкции.
Позиция 1. Верхняя площадка робота, диск диаметром 200мм, закрепленный на оси конструкции. Находится на высоте 950мм от пола, сверху имеет отражающую поверхность для прохождения маяков.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.