Санкт-Петербургский Государственный Университет
Информационных Технологий Механики и Оптики
Кафедра систем управления и информатики
Расчетно-графическая работа
по курсу " Робототехнические системы и комплексы"
Вариант 5
Выполнила: Наговицина Аня
гр. 5146
Преподаватель: Котельников Ю.П.
Санкт-Петербург
2006 г.
Дана робототехническая система, кинематическая схема которой представлена на рисунке 1.
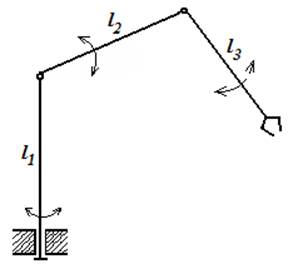
Рисунок 1 - Кинематическая схема робототехнической системы
Исходные
данные: ![]()

Основным вопросом при рассмотрении манипулирования с использованием роботов является способность поместить объект управления (схват манипулятора) в определенную точку с требуемой ориентацией в заданное время.
Прямая задача кинематики.
Определение ![]() - вектора,
определяющего положение схвата манипулятора, при известном векторе параметров
- вектора,
определяющего положение схвата манипулятора, при известном векторе параметров ![]() :
:
![]() ,
,
![]() .
.
Обратная задача кинематики.
Определение параметров ![]() звеньев
манипулятора, если известен вектор
звеньев
манипулятора, если известен вектор ![]() - радиус вектор схвата.
- радиус вектор схвата.
Для решения прямой и обратной задач необходимо определенным образом осуществлять выбор систем координат.
Манипулятор представляет собой систему материальных тел (звеньев), образующих разомкнутую кинематическую цепь. Звенья этой цепи образуют 3 вращательных кинематических пары пятого класса.
Для того чтобы описать положение ![]() - го звена
- го звена ![]() в
системе
в
системе ![]() , свяжем с этим звеном декартову систему
координат
, свяжем с этим звеном декартову систему
координат ![]() . В качестве основной системы обычно
выбирается система
. В качестве основной системы обычно
выбирается система ![]() , связанная со стойкой
манипулятора. Ось
, связанная со стойкой
манипулятора. Ось ![]() направим вдоль первого звена
манипулятора. В качестве оси
направим вдоль первого звена
манипулятора. В качестве оси ![]() выбирается
перпендикуляр к оси
выбирается
перпендикуляр к оси ![]() , а направление
, а направление ![]() задается так, чтобы система координат
задается так, чтобы система координат ![]() была правой. При таком выборе систем
координат каждая
была правой. При таком выборе систем
координат каждая ![]() - тая система координат связана
с
- тая система координат связана
с ![]() - тым звеном манипулятора.
- тым звеном манипулятора.
Далее выбираем системы
координат, руководствуясь следующими правилами выбора: ось ![]() при
при ![]() совпадает
с осью кинематической пары с тем же номером. Ось
совпадает
с осью кинематической пары с тем же номером. Ось ![]() для
для ![]() определяется как общий перпендикуляр к
осям
определяется как общий перпендикуляр к
осям ![]() и
и ![]() и имеет
направление от
и имеет
направление от ![]() к
к ![]() . Ось
. Ось ![]() для
для ![]() выбирается
так, чтобы система координат
выбирается
так, чтобы система координат ![]() была правой. Система
координат
была правой. Система
координат ![]() связывается со схватом манипулятора.
связывается со схватом манипулятора.
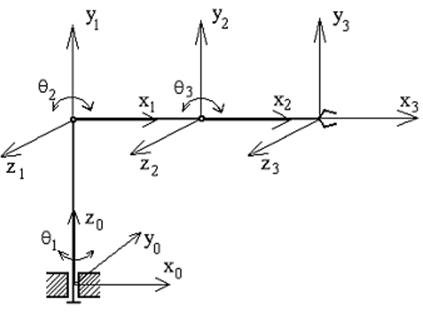
Рисунок 2 - Выбор систем координат
3 НАХОЖДЕНИЕ МАТРИЦ ПРЕОБРАЗОВАНИЙ КООРДИНАТ
Обозначим угол поворота i-го звена относительно (i-1)-го
через![]() . Совокупность величин
. Совокупность величин ![]() однозначно определяют положение
механизма в пространстве. Эти величины названы обобщенными координатами
механизма и обозначаются вектором
однозначно определяют положение
механизма в пространстве. Эти величины названы обобщенными координатами
механизма и обозначаются вектором ![]() , причем
, причем ![]() , где
, где ![]() - для
вращательной кинематической пары.
- для
вращательной кинематической пары.
Для определения матриц
перехода из i-ой в (i-1)-ую
систему координат необходимо найти следующие величины: ![]() ,
,
![]() ,
, ![]() ,
, ![]() . Для этого совместим систему
. Для этого совместим систему ![]() с системой
с системой ![]() посредством
следующих последовательно выполняемых операций:
посредством
следующих последовательно выполняемых операций:
а) поворот на угол ![]() вокруг оси
вокруг оси ![]() до тех пор, пока оси
до тех пор, пока оси ![]() и
и ![]() не
станут параллельными;
не
станут параллельными;
б) перенос на величину ![]() вдоль оси
вдоль оси ![]() до тех
пор, пока оси
до тех
пор, пока оси ![]() и
и ![]() не
совместятся;
не
совместятся;
в) перенос на величину ![]() вдоль оси
вдоль оси ![]() до
совпадения начала координат
до
совпадения начала координат ![]() с началом координат
с началом координат ![]() ;
;
г) поворот на угол ![]() относительно оси
относительно оси ![]() до
совмещения всех координатных осей.
до
совмещения всех координатных осей.
Из четырёх параметров ![]() ,
, ![]() ,
, ![]() ,
, ![]() , определяющих переход от одной системы
координат к другой, параметры
, определяющих переход от одной системы
координат к другой, параметры ![]() и
и ![]() всегда постоянны и определяются
конструктивными особенностями звеньев. Из двух других параметров (
всегда постоянны и определяются
конструктивными особенностями звеньев. Из двух других параметров (![]() ,
, ![]() ) один
является переменным и совпадает с обобщённой координатой, соответствующей (i-1)-ой кинематической паре; другой параметр постоянен: для вращательной
кинематической пары
) один
является переменным и совпадает с обобщённой координатой, соответствующей (i-1)-ой кинематической паре; другой параметр постоянен: для вращательной
кинематической пары![]() , для поступательной
кинематической пары
, для поступательной
кинематической пары ![]() .
.
Общий случай матрицы преобразования из (i-1)-ой системы координат в i-ую:
 .
.
1)
Перехода из СК ![]() в СК
в СК ![]() :
:
 .
.
Матрица преобразования
координат:  ,
,  ,
,  .
.
2)
Перехода из СК ![]() в СК
в СК ![]() :
:
 .
.
Матрица преобразования
координат:  ,
,  ,
,  .
.
3)
Перехода из СК ![]() в СК
в СК ![]() :
:
 .
.
Матрица преобразования
координат:  ,
,  ,
,  .
.
4 РЕШЕНИЕ ПРЯМОЙ ЗАДАЧИ КИНЕМАТИКИ
Вектор, определяющий положение схвата манипулятора:
Выполним проверки:
1)
Пусть ![]() ,
, ,
,![]() ,
т.е. манипулятор выставлен вертикально вверх в абсолютной системе координат –
все три плеча манипулятора будут проектироваться на ось z0.
Тогда подставляя в выражение для
,
т.е. манипулятор выставлен вертикально вверх в абсолютной системе координат –
все три плеча манипулятора будут проектироваться на ось z0.
Тогда подставляя в выражение для ![]() значения углов поворота,
получим:
значения углов поворота,
получим:
 (верно).
(верно).
2)
Пусть ![]() ,
,![]() ,
,![]() ,
т.е. манипулятор находится в исходном положении (рисунок 2) – плечо 1
манипулятора будет проектироваться на ось z0,
а плечи 2 и 3 – на ось x0. Тогда подставляя
в выражение для
,
т.е. манипулятор находится в исходном положении (рисунок 2) – плечо 1
манипулятора будет проектироваться на ось z0,
а плечи 2 и 3 – на ось x0. Тогда подставляя
в выражение для ![]() значения углов поворота, получим:
значения углов поворота, получим:
 (верно).
(верно).
3)
Пусть  ,
,![]() ,
, ,
т.е. плечо 1 повернуто относительно оси вращения на 900(проектируется
на ось z0), плечо 2 в исходном положении
(проектируется на ось y0), а плечо 3-
повернуто вверх на 900 (проектируется на ось z0).
Подставляя в выражение для
,
т.е. плечо 1 повернуто относительно оси вращения на 900(проектируется
на ось z0), плечо 2 в исходном положении
(проектируется на ось y0), а плечо 3-
повернуто вверх на 900 (проектируется на ось z0).
Подставляя в выражение для ![]() значения углов поворота,
получим:
значения углов поворота,
получим:
 (верно).
(верно).
Результаты проверки подтверждают правильность выбора систем координат и расчетов.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




