![]() .
.
Нормированное время переходного процесса для ![]()
![]() с, перерегулирование
с, перерегулирование ![]() %. Минимально допустимый радиус
распределения корней
%. Минимально допустимый радиус
распределения корней  .
.
Возьмем ![]()
![]()
Коэффициенты полинома ![]() ,
, ![]() и его корень
и его корень ![]()
Коэффициенты матрицы обратной связи ![]() , соответствующей канонической
(управляемой) форме объекта, рассчитываются как
, соответствующей канонической
(управляемой) форме объекта, рассчитываются как
![]() .
.
![]() .
.
Для обратного перехода (от канонической формы к исходному представлению системы) используется преобразование
![]() ,
,
где ![]() –
матрица преобразования (подобия), рассчитываемая как
–
матрица преобразования (подобия), рассчитываемая как ![]() , а
, а ![]() – матрица управляемости канонической
модели ОУ.
– матрица управляемости канонической
модели ОУ.
 ,
,  .
.
![]() .
.
1)
Для 2-ого и 3-его каналов алгоритм стабилизации аналогичен.
2)
3)
7.2 МОДЕЛИРОВАНИЕ ПЕРВОГО КАНАЛА
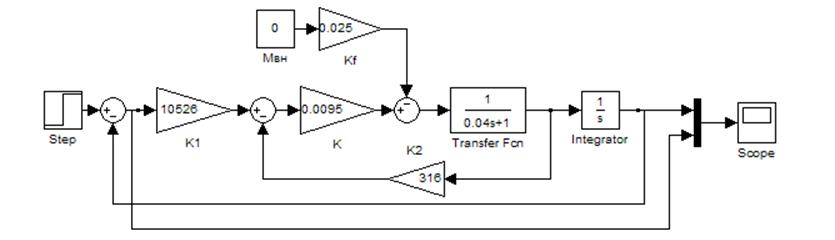
Рисунок 5 - Схема моделирования первого канала
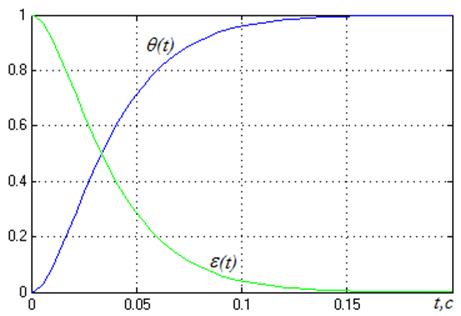
На рисунке 6 представлены
результаты моделирования первого канала при единичном ступенчатом воздействии ![]() и
и ![]() .
.
|
Рисунок 6
|
Ступенчатое воздействие система отрабатывает без ошибок.
Перерегулирование ![]() %;
%;
Время переходного процесса ![]() =0.1 с.
=0.1 с.
На рисунке 7 представлены
результаты моделирования первого канала при линейно нарастающем воздействии  и
и ![]() .
.
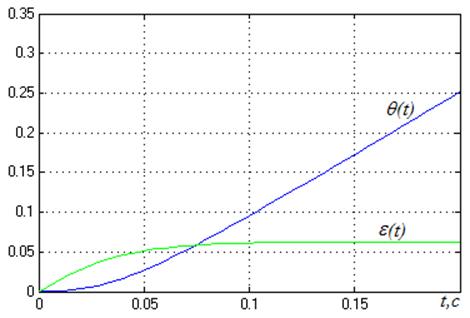
Рисунок 7
Линейно нарастающее воздействие система отрабатывает с постоянной ошибкой.
На рисунке 8 представлены
результаты моделирования первого канала при воздействии с постоянным ускорением
![]() и
и ![]() .
.
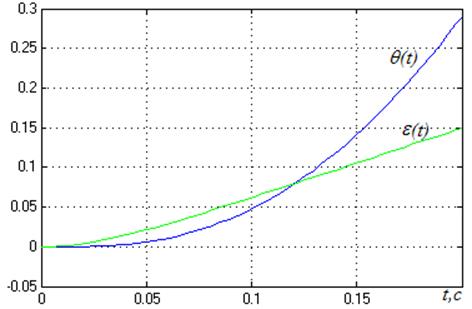
Рисунок 8
Воздействие с постоянным ускорением система отрабатывает с линейно нарастающей ошибкой.
На рисунке 9 представлены
результаты моделирования первого канала при единичном ступенчатом воздействии ![]() и
и ![]()
![]() .
.
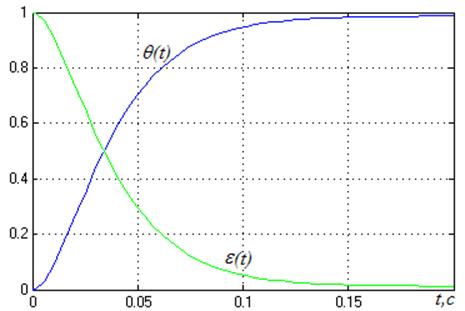
Рисунок 9
7.3 МОДЕЛИРОВАНИЕ ВТОРОГО КАНАЛА
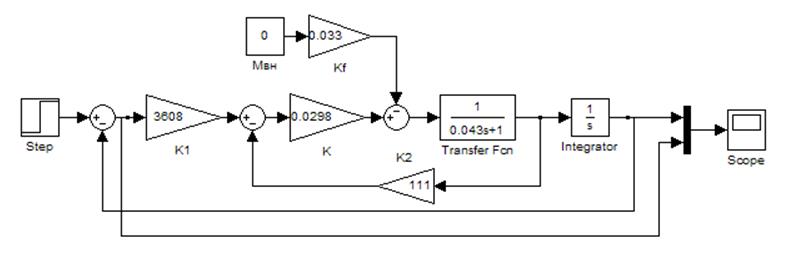
Рисунок 10 - Схема моделирования второго канала
На рисунке 11 представлены
результаты моделирования второго канала при единичном ступенчатом воздействии ![]() и
и ![]() .
.
|
Рисунок
|
Ступенчатое воздействие система отрабатывает без ошибок.
Перерегулирование ![]() %;
%;
Время переходного процесса ![]() =0.1 с.
=0.1 с.
На рисунке 12 представлены
результаты моделирования второго канала при линейно нарастающем воздействии и ![]() .
.
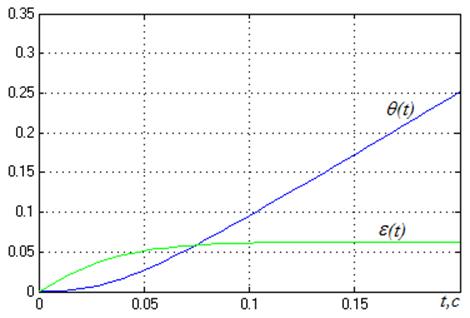
Рисунок 12
Линейно нарастающее воздействие система отрабатывает с постоянной ошибкой.
На рисунке 13 представлены
результаты моделирования второго канала при воздействии с постоянным ускорением
![]() и
и ![]() .
.
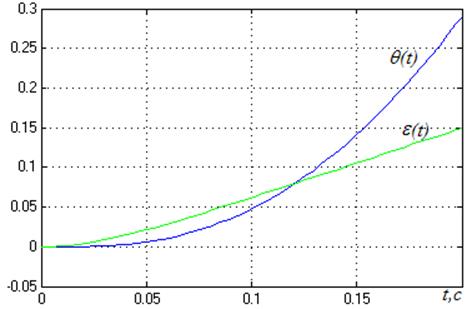
Рисунок 13
Воздействие с постоянным ускорением система отрабатывает с линейно нарастающей ошибкой.
На рисунке 14 представлены
результаты моделирования второго канала при единичном ступенчатом воздействии ![]() и
и ![]()
![]() .
.
Рисунок 14
7.4 МОДЕЛИРОВАНИЕ ТРЕТЬЕГО КАНАЛА
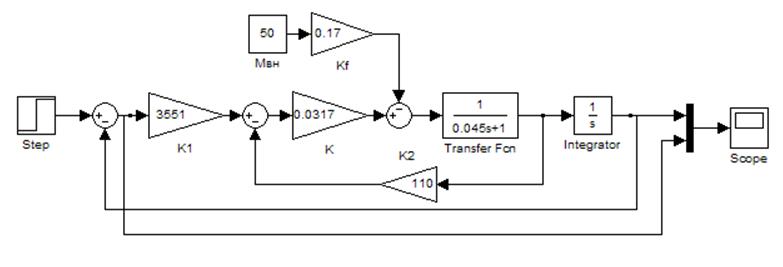
Рисунок 15 - Схема моделирования третьего канала
На рисунке 16 представлены
результаты моделирования третьего канала при единичном ступенчатом воздействии ![]() и
и ![]() .
.
|
Рисунок
|
Ступенчатое воздействие система отрабатывает без ошибок.
Перерегулирование ![]() %;
%;
Время переходного процесса ![]() =0.1 с.
=0.1 с.
На рисунке 17 представлены
результаты моделирования третьего канала при линейно нарастающем воздействии и ![]() .
.
Рисунок 17
Линейно нарастающее воздействие система отрабатывает с постоянной ошибкой.
На рисунке 18 представлены
результаты моделирования третьего канала при воздействии с постоянным
ускорением ![]() и
и ![]() .
.
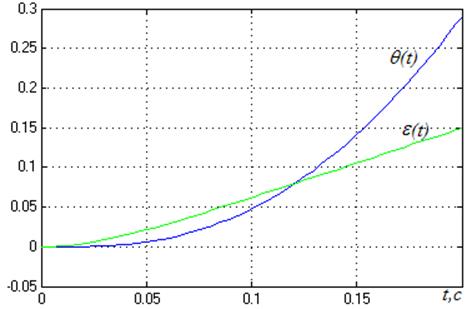
Рисунок 18
Воздействие с постоянным ускорением система отрабатывает с линейно нарастающей ошибкой.
На рисунке 19 представлены
результаты моделирования третьего канала при единичном ступенчатом воздействии ![]() и
и ![]()
![]() .
.
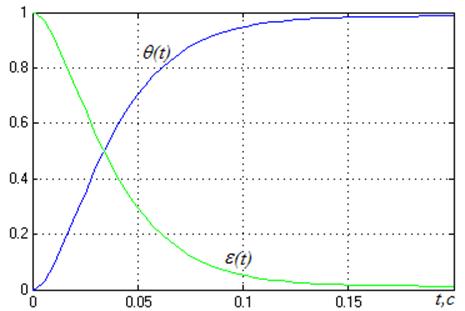
Рисунок 19
7.5 МОДЕЛИРОВАНИЕ ОБЩЕЙ СИСТЕМЫ
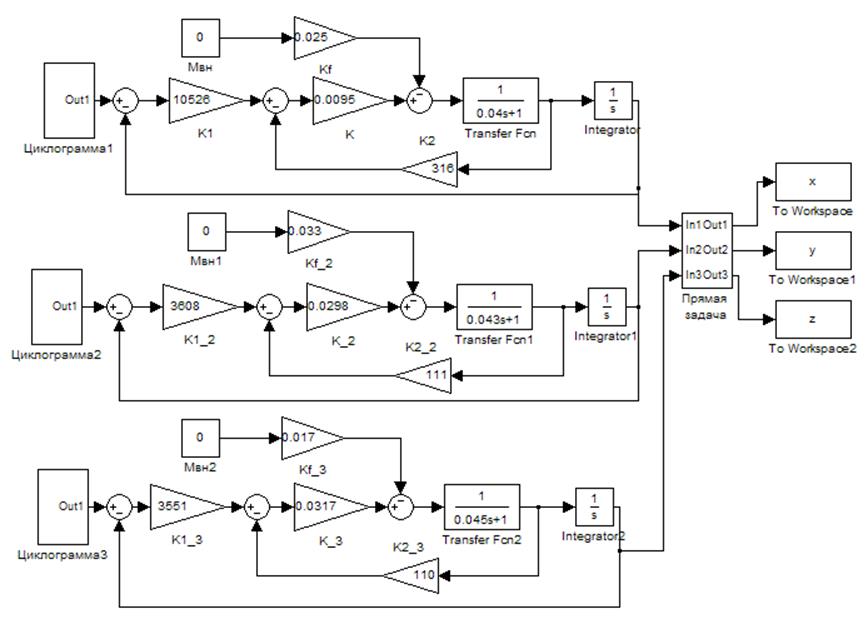
Рисунок 20 - Схема моделирования всей системы
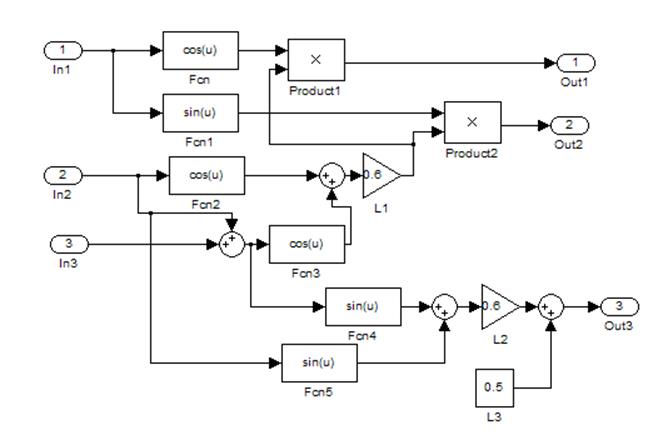
Рисунок 21 - Схема моделирования матрицы Rcx (решение прямой задачи)
Зададим поведение робота следующим образом (см. таблицу 1):
Таблица 1
|
№ шага |
|
|
|
|
1 |
0 |
0 |
|
|
2 |
|
0 |
|
|
3 |
0 |
0 |
0 |
|
4 |
|
|
0 |
|
5 |
0 |
|
|
Результаты моделирования по трем координатам представлены на рисунках 22 – 24 соответственно.
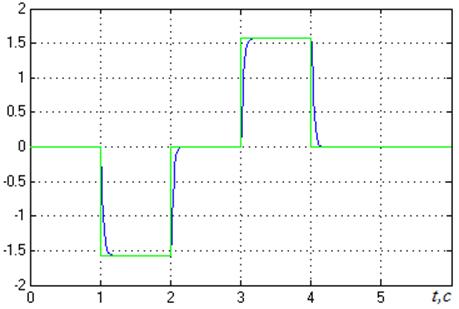
Рисунок 22 – Отработка циклограммы первым каналом
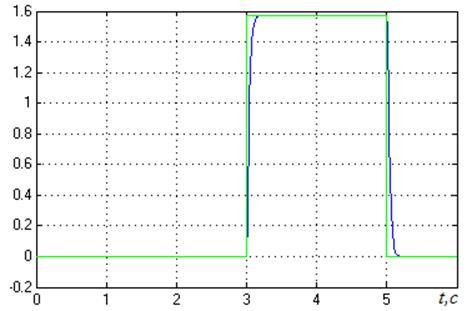
Рисунок 23 – Отработка циклограммы вторым каналом
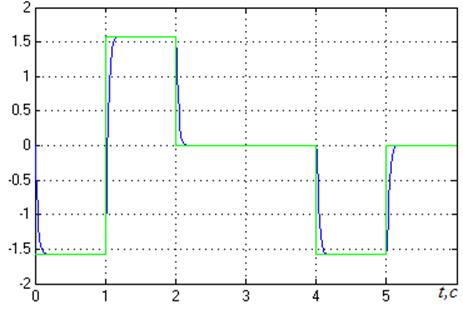
Рисунок 24 – Отработка циклограммы третьим каналом
На рисунке 25 представлена траектория движения манипулятора по трём координатам (x,y,z), в соответствии с пятью последовательными изменениями положения в пространстве этого манипулятора (в соответствии с циклограммой):
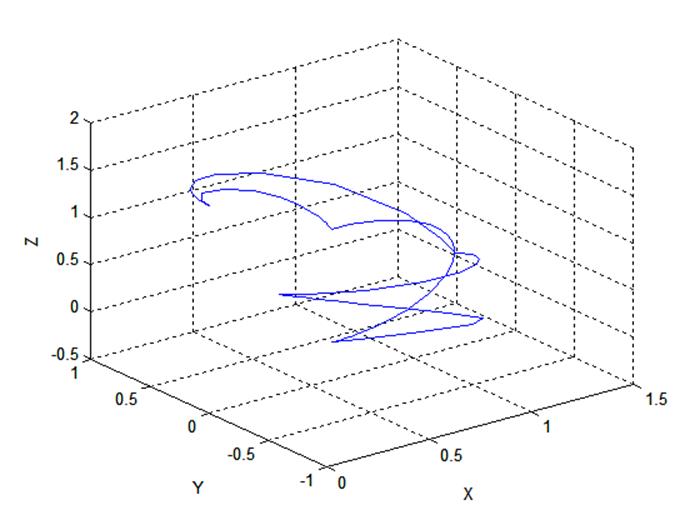
Рисунок 25 - Траектория движения схвата манипулятора по заданной циклограмме
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.