3. Разработка структурных схем динамических МОДЕЛЕЙ ЭЛЕКТРОмагнитного привода
3.1. Вводные положения
Для математического моделирования динамических свойств различных систем используется два принципиально различных подхода. В первом выполняется решение дифференциальных уравнений без отражения реальной структуры системы (метод непосредственного математического моделирования). Во втором же программная реализация математической модели формируется в соответствии со структурной схемой исследуемой системы (метод структурного моделирования).
Первый метод относительно прост, но имеет ряд недостатков, особенно ярко проявляющихся при моделировании сложных систем. Основные из них: невозможность использовать результаты предварительной работы по составлению структурной схемы проектируемой системы при компоновке схемы расчетной модели; получение переходного процесса, как правило, по одной переменной и в связи с этим отсутствие информации о других регулируемых координатах системы; трудность отыскания ошибок в работе системы.
При программной реализации второго метода структурная схема составляется из типовых динамических звеньев и поэтому является воплощением средств вычислительной техники математической модели реальной системы, которая наглядно отражает тип динамических звеньев и характер связей между ними, а также направление и последовательность преобразования сигналов информационно-управляющих и энергетических каналов. Метод структурного моделирования лишен указанных выше недостатков метода непосредственного моделирования. При его применении значительно упрощаются разработка и анализ программной реализации математической модели системы или устройства [10].
Структурные схемы, разрабатываемые средствами визуального объектно-ориентированного программирования Simulink, в [7] называют блок-диаграммами. Использование такого понятия целесообразно для решения задач проектирования технических устройств и систем, так как позволяет избежать смешивания терминов из разных проектных процедур.
Визуальное программирование средствами Simulink обеспечивает доступ ко всем основным возможностям вычислительной среды MATLAB, пользователю не обязательно иметь навыки в использовании других инструментов, входящих в состав вычислительной среды. Немаловажным достоинством приложения Simulink является также то, что с помощью его программных средств создается программный модуль, который при симуляции (имитации) обрабатывается методом непосредственного математического моделирования. Инструкции по работе с программно-инструментальными средствами Simulink изложены в [7 – 9, 12, 14].
Организация и проведение непосредственного цифрового управления требуют от разработчика исчерпывающих знаний о моделируемой системе и навыков структурного моделирования ее свойств с учетом положений, рассмотренных во втором разделе настоящего пособии. Эти обстоятельства и определяют содержание последующих разделов применительно к решению задач управления электромагнитным приводом.
3.2. Схемно-конструктивная характеристика системы
Стремление к удовлетворению потребностей в компактном и управляемом электрооборудовании привело к появлению специализированных приводов, свойства которых подчинены критерию качества технологического оборудования в целом и условиям конструктивной совместимости с ним. С указанным направлением развития электрооборудования связано и понятие комплектного электромагнитного привода (КЭМП) постоянного тока, используемого для представления свойств технической системы, состоящей из средств питания и управления (СПиУ), электромагнитного двигателя (ЭМД), рабочего органа (РО) и согласующих устройств (СУ), (рис. 3.1).
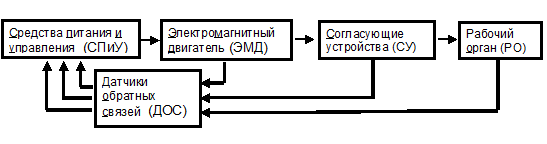
Рис. 3.1. Обобщенная структурная схема КЭМП
В представленной структурной схеме отражены все возможные способы использования датчиков обратных связей (ДОС) состояния компонентов привода. Для СУ и РО это показатели движения. Для ЭМД помимо показателей движения можно использовать ДОС по току обмотки и температуре. В СПиУ кроме сигналов ДОС поступают и управляющие сигналы от оборудования, где КЭМП используется.
Создать СПиУ можно на основе типовых схемотехнических решений, включая элементы вычислительной техники (чаще всего − микроконтроллеры). В усилителях мощности СПиУ эти решения ориентированы на широтно-импульсную модуляцию напряжения постоянного тока либо использование управляемых выпрямителей на тиристорах. Примеры программных реализаций моделей таких усилителей мощности с использованием модулей Simulink можно найти в [5].
В СУ могут быть использованы рычаги, пружины, механические демпферы, ограничители перемещения якоря ЭМД и подвижных частей РО. Это известные механические элементы и узлы, применение которых в КЭМП должно изменить характер движения РО. В блок-диаграммах элементы СУ и РО могут быть представлены характеристиками с использованием приемов интерполяции либо аппроксимации.
Конструктивные решения ЭМД весьма разнообразны. Конструирование ЭМД выполняется с учетом назначения КЭМП и ограничений по весогабаритным, динамическим показателям, условиям нагревания, а также свойствам СПиУ. По технологическим, конструктивным и энергетическим свойствам для ЭМД наиболее приемлемым является цилиндрическое исполнение. В последующем изложении электромагнитная система (ЭМС), составленная из обмотки и магнитопровода, рассматривается как средство создания магнитного потока в ЭМД. Такое структурное подразбиение позволяет в математической модели КЭМП отражать возможность конструирования ЭМД с несколькими ЭМС при одном якоре. Это существенно при создании следящего либо позиционирующего приводов.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.