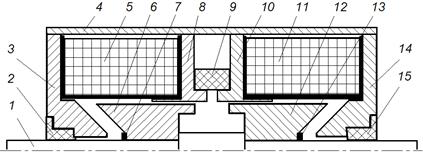
Представление об исполнении ЭМД с двумя ЭМС, обмотки которых работают в однополярном режиме (раздельно либо совместно), и одним якорем дает рис. 3.2.
Использование двух ЭМС обеспечивает чувствительность ЭМД к полярности управляющего сигнала. Раздельное исполнение ферромагнитных частей якоря целесообразно для формирования вида характеристик тяговых сил за счет изменения магнитного сопротивления в области дополнительного зазора у направляющего фланца (зоне так называемого воротничка), а раздельное исполнение магнитопроводов ЭМС обязательно для исключения перераспределения магнитного потока между рабочими зазорами, что отражается на тяговых усилиях при перемещении якоря.
|
|
|
Рис. 3.2. Конструктивная схема ЭМД с двумя ЭМС и одним втягивающимися якорем: 1 – шток; 2 и 15 – втулки направляющие; 3 и 14 - фланцы упорные с коническим стопом; 4 – ярмо двух ЭМС; 5 и 11 – обмотки; 6 и 12 – ферромагнитные части якоря; 7 и 13 -кольца упорные; 8 и 10 – фланцы направляющие; 9 – распорная немагнитная втулка |
При кажущейся простоте КЭМП весьма сложны в управлении, что обусловлено нелинейностью свойств и сложным взаимодействием его компонентов. Во многом процесс осложняется тем, что в отличие от вращающихся электрических машин свойства ЭМД зависят от двух параметров его состояния: тока обмотки i и рабочего воздушного зазора δ.
3.3. Структурная схема привода как системы автоматического регулирования
Излагаемый в данном разделе материал адаптирован к свойствам оборудования макета КЭМП, испытываемого в лабораторных условиях с использованием персонального компьютера. Такое макетирование целесообразно перед переносом результатов настройки параметров цифрового регулятора в микроконтроллер. Полагается, что все параметры электромагнитного механизма известны по результатам проектирования ЭМД (результаты электромагнитного расчета), измерений сопротивления обмотки, взвешивания подвижных частей, определения сил сопротивления движению.
3.3.1. Описание структуры
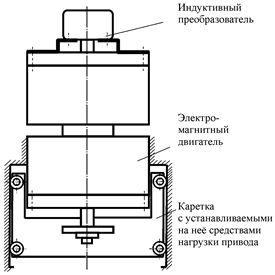
3.3.1.1. Основные элементы электромеханического оборудования привода представлены рис. 3.3, а рис. 3.4 иллюстрирует структурную схему макета.
|
|
|
|
Рис. 3.3. Конструктивная схема электромеханического оборудования |
Рис. 3.4. Структурная схема системы |
Роль СУ (см. рис. 3.3) играют направляющие и ограничители хода каретки. Каретка имитирует РО, она жестко соединена со штоком якоря. Перемещение каретки в направляющих происходит с малым трением за счет использования в опорах шарикоподшипников.
В оборудовании рассматриваемого макета использован цифровой ДОС перемещения якоря ЭМД. Информационный преобразователь (ИП) ДОС выполнен на основе катушки индуктивности, в полости которой перемещается разрезанный вдоль ферромагнитный шток, закрепленный на выступающей части немагнитного штока якоря ЭМД. Металлический кожух ИП выполняет функции электромагнитного экрана, исключающего влияние электромагнитных помех. В состав оборудования также входит: индикаторная головка для тарировки ДОС и средства внесения возмущающих воздействий (например, изменения массы РО либо упругого поджатия без изменения массы подвижных частей РО).
Электромагнитный привод на структурной схеме (рис. 3.4) представлен ЭМД с двумя ЭМС и усилителем мощности (УМ), выполненным по принципу широтно-импульсного преобразования (ШИП) напряжения постоянного тока источника питания СПиУ.
В составе СПиУ имеется персональный компьютер (ПК) нижнего уровня и устройство его связи с объектом (УСО). К УСО отнесены ИП ДОС и блок микроконтроллеров (МК). Управление ШИП из УСО выполняется одним из микроконтроллеров (МК1). Перемещение якоря ЭМД воспринимается ИП. С помощью МК2 это перемещение преобразуется в цифровой код, который используется в ШИП. Назначение ПК нижнего уровня – обеспечение функций цифрового регулятора в масштабе реального времени с возможностью изменения его свойств в среде MSDOSбез аппаратных средств, которые необходимы для программирования микроконтроллеров. Назначение ПК верхнего уровня − синтез регулятора с использованием возможностей среды MatLab, диспетчеризация с использованием программных средств пакета LabVIEW, архивирование и визуализация наблюдений. Связь между ПК разных уровней и ПК с УСО выполнена в стандарте интерфейса RS-232 через последовательные порты.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.