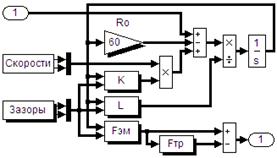
Блок-диаграмма ЭМД
представлена рис. 3.8. Здесь для обращения к интерполированным характеристикам ![]() ,
, ![]() K(i, δ)
и
K(i, δ)
и ![]() использованы блоки с обозначением L, K и
использованы блоки с обозначением L, K и ![]() . Величина сопротивления обмотки задается в
блоке с обозначением
. Величина сопротивления обмотки задается в
блоке с обозначением ![]() .
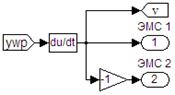
При расчете скоростей якоря для ЭМС1 и ЭМС2 (вид б) используется
виртуальная передача данных о перемещении РО (yро). Для
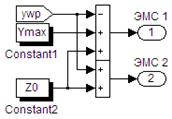
расчета величин зазоров (вид в) используются данные о величине
максимально возможного хода РО (ymax) и минимального
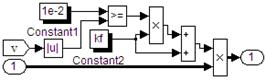
зазора (δ0) в ЭМД. сила
трения (вид г) рассчитывается с учетом оговоренного коэффициента kf. Уменьшение
трения происходит при скорости
0.01 м/c.
.
При расчете скоростей якоря для ЭМС1 и ЭМС2 (вид б) используется
виртуальная передача данных о перемещении РО (yро). Для
расчета величин зазоров (вид в) используются данные о величине
максимально возможного хода РО (ymax) и минимального
зазора (δ0) в ЭМД. сила
трения (вид г) рассчитывается с учетом оговоренного коэффициента kf. Уменьшение
трения происходит при скорости
0.01 м/c.
|
а |
б |
|
в |
г |
|
Рис. 3.8. Блок-диаграмма ЭМД |
|
Блок диаграмма блоков СУ и РО представлена рис. 3.9. Здесь масса подвижных частей механического оборудования (включая и массу якоря) mп.ч задается блоком Constant, параметрическое возмущение, обусловленное изменением массы, вносится с применением блока Step. Сила сопротивления движению Fс обусловлена весом подвижных частей.
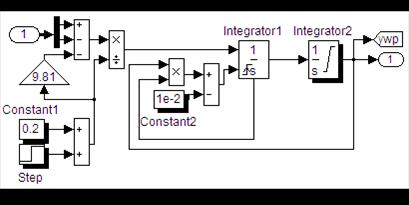
Рис. 3.9. Блок-диаграмма СУ и РО
Свойства СУ учтены ограничением хода РО во втором интеграторе.
Соответствие параметров модели и макета задано табл. 2.
Таблица 2
|
Рисунок |
Блок |
Параметр |
Значение |
|
3.7, а |
Gain |
Gain |
60 |
|
3.7, б |
Constant |
Constant value |
2e–3 |
|
Gain |
Gain |
150e3 |
|
|
3.7, в |
Quantizer |
Quantization interval |
1 |
|
Saturation |
Upper limit, Lower limit |
600, 0 |
|
|
Zero-Order Hold |
Sample time |
1/1800 |
|
|
Gain |
Gain |
150e3 |
|
|
3.7, г |
Discrete |
A, B, C, D |
Ad, Bd, Cd, Dd |
|
State-Space |
Sample time |
1/1800 |
|
|
Quantizer |
Quantization interval |
1 |
|
|
Gain |
Gain |
1/127 |
|
|
3.7, д |
Gain |
Gain |
–1 |
|
Saturation1 |
Upper limit, Lower limit |
1, –1 |
|
|
Saturation2 |
Upper limit, Lower limit |
inf, 0 |
|
|
Unit Delay |
Sample time |
1/1800 |
|
|
Repeating |
Time values |
[0 1/1800] |
|
|
Sequence |
Output values |
[0 1] |
|
|
3.8, в |
Constant1 |
Constant Value |
4e–3 |
|
Constant2 |
Constant Value |
0.1e–3 |
|
|
3.8, г |
Constant1 |
Constant Value |
1e–2 |
|
Constant2 |
Constant Value |
0.2 |
|
|
3.9 |
Constant1 |
Constant Value |
0.2 |
|
Constant2 |
Constant Value |
1e–2 |
|
|
Step |
Step time |
0.2 |
|
|
Final value |
0.2 |
||
|
Integrator2 |
Upper limit, Lower limit |
4e–3 |
Для параметрического задания свойств ЭМД используются данные электромагнитного расчета ЭМС, получаемые с использованием программных средств, описанных в [12]. Файл данных содержит сведения о количестве точек интерполяции характеристик потокосцепления по току, зазору, а также собственно значения величин потокосцепления. Обработка этих данных с целью получения характеристик L(i, δ), K(i, δ) и Fэм(i, δ) выполняется приведенной ниже программой (ради сокращения размера распечатки приводятся без операторов вывода результатов интерполяции на экран).
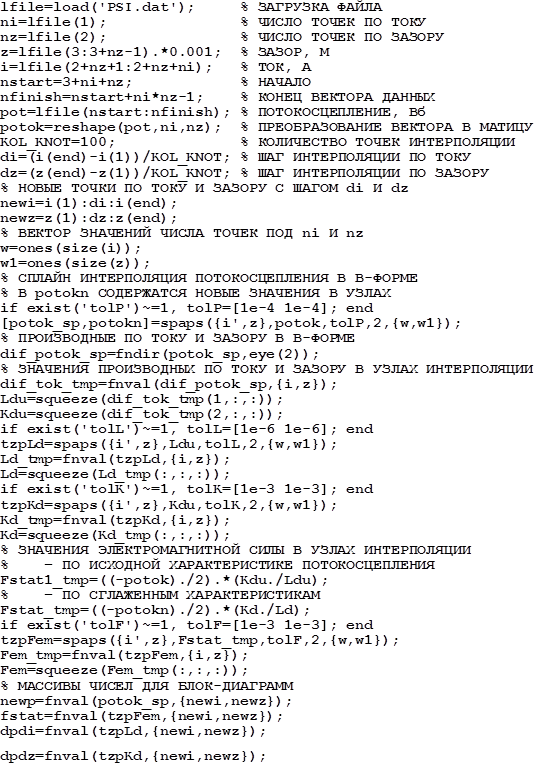
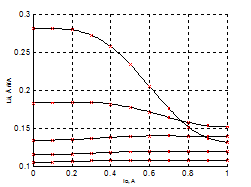
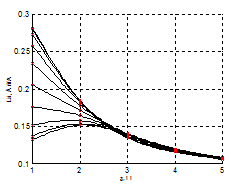
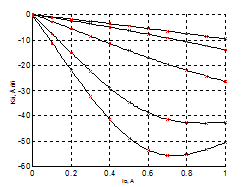
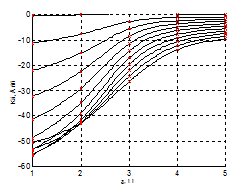
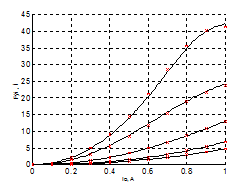
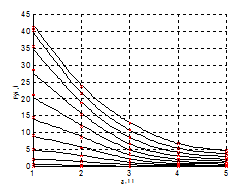
Получаемые при работе с программой характеристики имеют вид, иллюстрируемый рис. 3.10.
|
а |
б |
|
в |
г |
|
д |
е |
|
Рис. 3.9. Характеристики L(i, δ), K(i, δ) и Fэм(i, δ) |
|
Эти характеристики воспроизводятся в блок-диаграммах более детально (по числу точек интерполяции).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.