Для структурного
моделирования величины ![]() ,
, ![]() и
и ![]() целесообразно рассматривать в форме
характеристик, интерполированных двумерным кубическим сплайном и позволяющих
осуществлять параметрическое задание свойств ЭМД. Для доступа к ним в Simulink могут быть
использованы блоки LookUpTable-2D. При этом
создаются условия, позволяющие пространство интерполяции ставить в соответствие
параметрам состояния ЭМД. При моделировании на основе (3.1), (3.5) – (3.8)
определяется i, а на основе (3.2) − δ. Положения электромагнитного
расчета методом конечных разностей, а также получения интерполированных
характеристик рассмотрены в [12].
целесообразно рассматривать в форме
характеристик, интерполированных двумерным кубическим сплайном и позволяющих
осуществлять параметрическое задание свойств ЭМД. Для доступа к ним в Simulink могут быть
использованы блоки LookUpTable-2D. При этом
создаются условия, позволяющие пространство интерполяции ставить в соответствие
параметрам состояния ЭМД. При моделировании на основе (3.1), (3.5) – (3.8)
определяется i, а на основе (3.2) − δ. Положения электромагнитного
расчета методом конечных разностей, а также получения интерполированных
характеристик рассмотрены в [12].
В силу того, что
макетируемая система работает практически в длительном режиме, изменение во времени
теплового состояния ЭМД в программной реализации модели здесь не
рассматривается. Сопротивление обмоток принимается соответствующим нагретому
состоянию ЭМД с учетом способа управления им. Так, при раздельном управлении в
макетируемом приводе, если величина ![]() обусловлена практически
только весом подвижных частей, ток протекает преимущественно по одной обмотке,
его величина меньше, нежели при совместном управлении. Это существенно
отражается на температуре ЭМД. Сопротивление обмотки в нагретом состоянии Rо может быть рассчитано по формуле
обусловлена практически
только весом подвижных частей, ток протекает преимущественно по одной обмотке,
его величина меньше, нежели при совместном управлении. Это существенно
отражается на температуре ЭМД. Сопротивление обмотки в нагретом состоянии Rо может быть рассчитано по формуле
![]() , (3.8)
, (3.8)
где ![]() –
сопротивление обмотки в холодном состоянии;
–
сопротивление обмотки в холодном состоянии; ![]() –
термический коэффициент меди (
–
термический коэффициент меди (![]() = 0.0039 1/ºС).
= 0.0039 1/ºС).
При оценке ![]() сопротивление источника питания
сопротивление источника питания ![]() как источника ЭДС можно принять равным нулю.
как источника ЭДС можно принять равным нулю.
3.3.3. Блок-диаграммы программной реализации модели
Блок-диаграммы моделируемой системы составлены с учетом положений системного подхода. Это заключается в подразбиении системы с использованием блоков SubSystem и виртуальной передачи некоторых данных через рабочее пространство вычислительной среды с использованием блоков Goto. Ввод исходных данных организован с использованием встроенного интерфейса блоков SubSystem. Блоки, в которых необходим ввод исходных данных, выделены тенью.
Вид верхнего уровня блок-диаграммы КЭМП (рис. 3.6) соответствует его структурной схеме (см. рис. 3.1) при использовании сигнала цифрового ДОС по положению подвижных частей электромагнитного механизма.
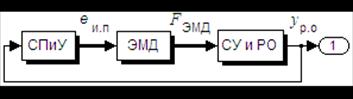
Рис.3.6. Блок-диаграмма КЭМП (верхний уровень)
На рис. 3.7 представлены блок-диаграммы СПиУ. Свойства СПиУ верхнего уровня (вид а) учитываются формой ЭДС еи.п. В блоке задания (БЗ) (вид б) постоянной величиной оговорено положение якоря и жестко связанного с ним РО. Коэффициент передачи усилителя Gain введен для преобразования линейного размера в код АЦП.
Блок-диаграмму для получения свойств ДОС иллюстрирует вид в. Назначение усилителя Gainто же, что и в БЗ. Блок Zero-Order-Hold устанавливает период частоты дискретизации по времени. Блок Saturation устанавливает диапазон кодов АЦП, а блок Quantizer введен для эмуляции целочисленной арифметики.
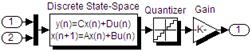
Блок, диаграмму для моделирования свойств регулятора иллюстрирует вид г. Для блока Discrete State-Space значения элементов матриц А, B, C, D передаются через рабочее пространство как результат синтеза параметров с применением программы Serch_R (см. раздел 4). Через окно интерфейса блока параметр Sampletime задается равным величине периода дискретизации. Блок Quantizer введен для эмуляции целочисленной арифметики, а блок Gain служит для эмуляции цифроаналогового преобразования сигнала управления.
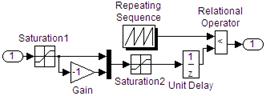
Блок-диаграмму для получения свойств ШИП иллюстрирует вид д. Здесь блок Saturation1 ограничивает уровень сигнала регулятора, а блок Saturation2 служит для формирования однополярного сигнала. В блоке Repeating Sequence эмулируются свойства пилообразного сигнала с частотой дискретизации ШИП.
|
а |
б |
|
в |
г |
|
д |
|
|
Рис. 3.7. Блок-диаграммы СПиУ: а − верхнего уровня; б – БЗ; в – ДОС; г – регулятора; д – ШИП |
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.