3.3.1.2. Техническое решение УСО в рассматриваемом макете реализовано двумя одинаковыми МК типа AVR семейства Classic корпорации ATMEL. Это позволяет обеспечить цифровую обработку сигнала от источника питания и реализовать алгоритм ШИП с раздельным либо совместным питанием обмоток ЭМД. Для обеспечения безопасной работы схемы и устранения наводок, характерных для силовых частей КЭМП, обеспечена гальваническая развязка выходов преобразователей.
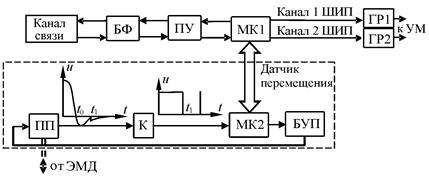
3.3.1.3. Принцип работы ДОС заключается в изменении частоты колебательного LCконтура, в котором чувствительным элементом служит ИП. С помощью специальных мер, принятых в блоке управления преобразователем (БУП), обеспечивается переходный процесс, иллюстрируемый временной диаграммой на функциональной схеме УСО (рис. 3.5).
Длительность импульса вынужденных колебаний в LCконтуре ограничена моментом времени t1. Это позволяет снизить время опроса ДОС и при подобранных параметрах LC контура обеспечить работу ШИП, УСО и цифрового регулятора в ПК нижнего уровня с частотой 1800 Гц.
|
|
|
Рис. 3.5. Функциональная схема УСО: БФ – блок фильтров; ПУ – преобразователь уровней; МК1 и МК2 – микроконтроллеры; ГР1, ГР2 – гальваническая развязка; ПП – преобразователь перемещения якоря ЭМД; К – компаратор; БУП – блок управления преобразователем |
В МК2 происходит: формирование импульса, подаваемого на вход элементов схемы БУП; генерация кода, соответствующего длительности переходного процесса в контуре; передача сгенерированного кода в МК1.
В зависимости от выбранного варианта алгоритма управления приводом микроконтроллер МК1 реализует функции ШИП с согласным либо раздельным питанием обмоток ЭМД через УМ.
3.3.2. Математическая модель
Динамические процессы в КЭМП описываются системой уравнений, полученных на основе фундаментальных положений электротехники (для контура питания обмотки − второй закон Кирхгофа и закон электромагнитной индукции) и механики (применительно к описанию движения подвижных частей привода с одной степенью свободы − второй закон Ньютона):
![]() ; (3.1)
; (3.1)
![]() .
(3.2)
.
(3.2)
Здесь обозначено: ![]() и
и ![]() −
составляющие ЭДС самоиндукции обмотки, обусловленные соответственно скоростями
изменения тока обмотки и движения якоря;
−
составляющие ЭДС самоиндукции обмотки, обусловленные соответственно скоростями
изменения тока обмотки и движения якоря; ![]() –
сопротивление цепи питания при рабочей температуре обмотки;
–
сопротивление цепи питания при рабочей температуре обмотки; ![]() ,
, ![]() ,
, ![]() - тяговое усилие на якоре ЭМД, сила
сопротивления со стороны приводимого оборудования и динамическая сила.
- тяговое усилие на якоре ЭМД, сила
сопротивления со стороны приводимого оборудования и динамическая сила.
Величина ![]() меньше электромагнитного усилия на якоре
меньше электромагнитного усилия на якоре ![]() вследствие трения якоря в зоне воротничка
ЭМС, оцениваемой силой
вследствие трения якоря в зоне воротничка
ЭМС, оцениваемой силой ![]() . С достаточной для
практических целей точностью соотношение между
. С достаточной для
практических целей точностью соотношение между ![]() и
и ![]() можно считать величиной постоянной,
учитываемой коэффициентом
можно считать величиной постоянной,
учитываемой коэффициентом ![]() . При
пессимистической оценке при неподвижном якоре
. При
пессимистической оценке при неподвижном якоре ![]() =
0.2. Как и в большинстве механических систем, при движении якоря
=
0.2. Как и в большинстве механических систем, при движении якоря ![]() можно считать уменьшающимся примерно в
два раза.
можно считать уменьшающимся примерно в
два раза.
Мгновенное значение электромагнитного усилия в ЭМД с относительно низкими скоростями движения якоря и насыщающимися элементами магнитопровода может быть определено по формуле [12]:
![]() , (3.3)
, (3.3)
где ![]() и
и ![]() − частные производные, интерполированные в пространстве
реальных изменений параметров состояния ЭМД (тока обмотки и величины рабочего зазора):
− частные производные, интерполированные в пространстве
реальных изменений параметров состояния ЭМД (тока обмотки и величины рабочего зазора):
![]() ; (3.4)
; (3.4)
![]() . (3.5)
. (3.5)
При дифференциальном включении двух
ЭМС результирующее значение электромагнитного усилия якоря определяется разностью
усилий от каждой ЭМС. Частные производные по (3.4) и (3.5) используются и при
определении ![]() и
и ![]() :
:
 ; (3.6)
; (3.6)
 . (3.7)
. (3.7)
Учет способа отработки ЭМД
управляющего воздействия (совместное либо раздельное питание обмоток каждой
ЭМС) отражается практически на всех компонентах представленных уравнений.
Исключение составляют ![]() и
и ![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.