Содержание
1. Исходные данные...................................................................................... 4
2. Анализ различных схем подъема. Обоснование выбранной схемы.. 5
2.1. Классификация по источнику энергии................................................. 5
2.2. Классификация по движителю.............................................................. 7
3. Выбор параметров силового треугольника........................................ 12
3.1.Подбор размеров силового треугольника.......................................... 13
4. Предварительный выбор параметров системы................................. 14
4.1. Определение наветренной площади................................................... 14
4.2. Расчёт ветровой нагрузки................................................................... 16
4.3. Расчёт момента неуравновешенности................................................ 17
4.4. Расчёт моментов и сил, действующих на объект.............................. 18
4.4.1. В транспортном положении......................................................... 18
4.4.2. В рабочем (вертикальном) положении....................................... 19
4.5. Расчёт поперечной базы...................................................................... 20
4.6. Расчёт домкратов................................................................................ 20
5. Окончательный выбор параметров по программе Vitesnitel.exe..... 21
5.1. Параметры груза (ракеты).................................................................. 21
5.2. Параметры промежуточного силового элемента.............................. 22
5.3. Параметры стрелы............................................................................... 22
5.4. Параметры рамы и опор грузоподъёмной установки........................ 23
5.5. Прочие исходные данные................................................................... 23
5.6. Определение параметров стрелы, промежуточного силового элемента и груза......................................................................................... 24
5.7. Определение параметров вытеснителя и гидроцилиндра................. 25
5.8. Параметры вытеснителя...................................................................... 29
5.8.1. Параметры рабочей камеры гидроцилиндра напорной магистрали..................................................................................................................... 29
5.8.2. Параметры камеры противодавления и магистрали сброса........ 30
5.8.3. Параметры гидравлической камеры вытеснителя....................... 31
5.8.4. Параметры газовой камеры вытеснителя..................................... 31
5.8.5. Параметры поршня-разделителя.................................................. 32
5.8.6. Параметры камер воздушных аккумуляторов давления и соединительных трубопроводов............................................................... 32
5.9. Определение прочих исходных данных для расчета динамики........ 35
5.10. Выбор параметров............................................................................. 36
5.11. Описание работы гидросхемы.......................................................... 51
6. Исследование влияния начального давления на параметры системы........................................................................................................ 53
Заключение.................................................................................................. 55
Приложение................................................................................................. 56
1. ИСХОДНЫЕ ДАННЫЕ
Исходными данными для проведения расчетов являются следующие параметры:
▪ Масса изделия - 78 тонн;
▪ Масса ТПК - 6 тонн;
▪ Длина изделия - Lтпк = 32 м;
▪ Диаметр изделия – Dтпк = 2,5 м;
▪ Центр тяжести ТПК с изделием и стрелой – x = 18 м;
▪ Расстояние от края шахты до оси заднего домкрата – Lбез= 1 м;
▪ Масса стрелы - 6 тонн;
▪ Допускаемое ускорение при подъеме - 11 м/с2;
▪ Схема подъема: пневмогидравлическая;
▪ Максимальное давление в гидросистеме – 28.0 МПа;
▪ Время подъема – 30 с;
▪ b = 2,0 м;
▪ d = 0,4 м;
▪ Н0 =2,84 м
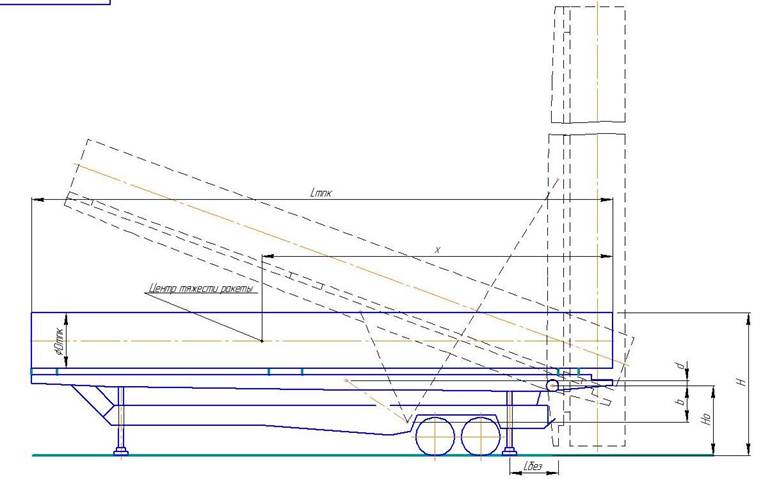
Рис. 1.1.
Принципиальная схема системы
АНАЛИЗ
РАЗЛИЧНЫХ СХЕМ ПОДЪЕМА. ОБОСНОВАНИЕ
ВЫБРАННОЙ СХЕМЫ
Существует множество схем подъема груза, но их все можно классифицировать по двум признакам: по источнику энергии и по движителю. Сочетание первого и второго дает такое широкое многообразие схем подъема, что дает возможность конструктору выбрать оптимальную.
2.1. Классификация по источнику энергии
a) Электрический привод
Электрическим приводом называется электромеханическое устройство, предназначенное для приведения в движение рабочих органов машин и управления их технологическими процессами, состоящее из передаточного, электродвигательного, преобразовательного и управляющего устройств.
Передаточное устройство содержит механические передачи и соединительные муфты, необходимые для передачи вырабатываемой двигателем механической энергии исполнительному механизму.
Преобразовательное устройство предназначается для управления потоком электрической энергии, поступающим из сети с целью регулирования режимов работы двигателя и механизма.
Управляющее устройство представляет собой информационную слаботочную часть системы управления, предназначенную для фиксации и обработки поступающей информации о задающих воздействиях и состоянии системы и выработки на её основе сигналов управления остальным устройствам.
Эти приводы обладают большим диапазоном мощностей и разнообразны по исполнению.
В грузоподъемных машинах применяют электропривод с двигателями постоянного и переменного тока. Основным преимуществом двигателей постоянного тока является возможность регулирования скорости в широких пределах и получения механических характеристик, наиболее полно удовлетворяющих требованиям, предъявляемым к работе грузоподъемных машин. Кроме того, двигатели постоянного тока обладают большей перегрузочной способностью и более напряженным режимом работы.
Электропривод с двигателем переменного тока по сравнению с приводом постоянного тока обладает более низкой стоимостью и меньшими затратами при эксплуатации, вследствие более простой и надежной конструкции. Кроме того для электродвигателей переменного тока не требуется преобразовательные устройства для получения энергии из сети.
Электропривод представляет собой электромеханическую систему, электрическая часть которой состоит из электромеханического преобразователя энергии и системы управления, а механическая включает в себя все связанные движущиеся массы привода и механизма.
Источниками электрической энергии может являться аккумуляторы и генераторы. Аккумуляторы выдают постоянный ток, а генератор переменный, при добавлении диодного моста в генератор можно получить постоянный ток. Для генератора нужен источник энергии – это может быть двигатель внутреннего сгорания или же турбина, работающая от энергии сжатых газов. Для схемы с аккумуляторами не нужно чтобы источник энергии обладал большой мощностью, поэтому вместо него можно использовать двигательную установку самой подъемной машины, часть энергии которой будет расходоваться на подзарядку аккумуляторов, но аккумуляторы не обладают достаточным ресурсом, поэтому их нельзя ставить на часто используемый грузоподъемный механизм.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




