![]() . (5.18)
. (5.18)
Например, в точках B и D
механизма ДВС ![]() ,
, ![]() ; в
точке A
; в
точке A ![]() ; в точках С и Е
; в точках С и Е ![]() ;
; ![]() ;
;
r- радиус шарнира; определяется ориентировочно из расчета на износостойкость. Диаметр шарнира в мм:
![]() , (5.19)
, (5.19)
где
![]() - допускаемое
давление; рекомендуется принимать
- допускаемое
давление; рекомендуется принимать ![]() = 15 МПа для антифрикционной
пары сталь-бронза. В этом случае
= 15 МПа для антифрикционной
пары сталь-бронза. В этом случае
![]() .
(5.20)
.
(5.20)
Во
вращательной паре 0-1 (коренная шейка) диаметр шарнира кроме того
определяют из расчета на кручение по уравновешивающему моменту ![]() в Н×м:
в Н×м:
 , (5.21)
, (5.21)
где
![]() - допускаемое
напряжение на кручение; при
- допускаемое
напряжение на кручение; при ![]() = 15 МПа
= 15 МПа
![]() .
.
Из
двух значений принимают большее. Например, при R01= 15400 Н и
![]() = 800 Н×м
= 800 Н×м ![]() мм;
мм; ![]() мм.
Следует принять
мм.
Следует принять ![]() мм по ГОСТ 6636-69. Механизм ДВС
имеет кососимметричное расположение звеньев и кинематических пар. При
назначении диаметров следует принимать
мм по ГОСТ 6636-69. Механизм ДВС
имеет кососимметричное расположение звеньев и кинематических пар. При
назначении диаметров следует принимать ![]() (шатунные
шейки) и
(шатунные
шейки) и ![]() (поршневые пальцы).
(поршневые пальцы).
При использовании компьютерных расчётов диаметры шатунных шеек рассчитывают по формуле (5.20) по максимальному из 24 значений R12и R14. Аналогично диаметры поршневых пальцев рассчитывают по максимальному значению реакций R23 и R45. Диаметры шатунных шеек d12 = d14 следует принимать на 10…15 мм меньше диаметра коренной шейки, а диаметры поршневых пальцев d23 = d45 - на 10…15 мм меньше диаметра d12. Рассчитанные по компьютерным распечаткам диаметры шарниров следует записать в пояснительную записку.
Механический КПД для двигателей рассчитывают по формуле:
![]() . (5.22)
. (5.22)
В механизмах технологических машин мгновенная мощность
![]() , (5.23)
, (5.23)
где
![]() - мощность сил
полезных сопротивлений; определяются по формуле (5.16), а механический КПД
- мощность сил
полезных сопротивлений; определяются по формуле (5.16), а механический КПД
![]() . (5.24)
. (5.24)
5.6. Аналитические методы
5.6.1. Силовой расчет диады 2-3
Расчетная схема диады 2-3 (рис. 5.2) отличается от аналогичной при графо-аналитическом методе.
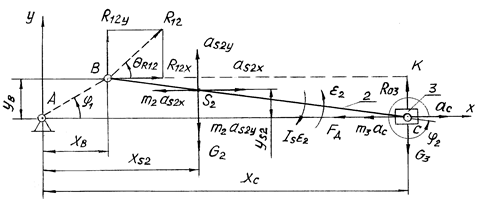
Рис. 5.2
Особенности схемы по сравнению с графо-аналитическим методом:
1) Движущая сила ![]() показана отрицательной, так как
она направлена к НМТ. Если такт "расширение" происходит в цилиндре Е,
то
показана отрицательной, так как
она направлена к НМТ. Если такт "расширение" происходит в цилиндре Е,
то ![]() – положительная.
– положительная.
2) Составляющие реакции R12
прикладывают в точке В и изображают в направлении координатных осей (![]() и
и ![]() ).
).
3) Составляющие сил инерции ![]() и
и ![]() показаны отрицательными с учетом
положительных направлений составляющих ускорений, так же, как и сила инерции
ползуна
показаны отрицательными с учетом
положительных направлений составляющих ускорений, так же, как и сила инерции
ползуна ![]() .
.
4) Аналогично момент сил инерции ![]() показан отрицательным.
показан отрицательным.
5) Вес G показан отрицательным, так как всегда направлен вниз.
6) Для составления моментных уравнений точка К вынесена за пределы диады.
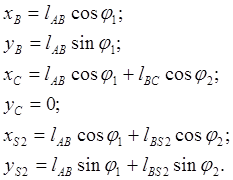
7) В моментных уравнениях используют координаты точек В, С и S2 (рис. 4.3).
 (5.25)
(5.25)
А) Реакцию ![]() находят из уравнения проекций сил,
действующих на диаду:
находят из уравнения проекций сил,
действующих на диаду:
![]() ;
; ![]() . (5.26)
. (5.26)
Б) Для определения второй составляющей ![]() записывают
уравнение моментов; в общем виде относительно произвольной точки A:
записывают
уравнение моментов; в общем виде относительно произвольной точки A:
![]() , (5.27)
, (5.27)
где x, y- координаты точки приложения силы, м;
X, Y- проекции силы на оси x и y, Н.
При
вычислении момента силы относительно выбранной точки К используют
локальные координаты ![]() и
и ![]() . Так,
например, для точки S2 это
будут координаты
. Так,
например, для точки S2 это
будут координаты ![]() и
и ![]() . В этом
случае уравнение (5.27) примет вид:
. В этом
случае уравнение (5.27) примет вид:
![]() .
. ![]()
![]()
 (5.28)
(5.28)
При
условии ![]() и
и ![]() искомая
реакция определяется так:
искомая
реакция определяется так:
 (5.29)
(5.29)
![]() .
.
Реакцию ![]() находят
из уравнения проекций сил на ось x:
находят
из уравнения проекций сил на ось x:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.