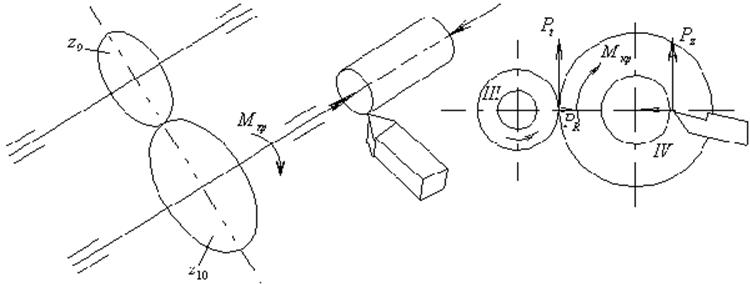
Рис. 6.5 Распределение сил действующих на шпинделе
1.Определяем действующие силы :

где Рt - тангенциальная сила, Н;
т - модуль данной группы, мм;
Мкр – крутящий момент на - валу, Н · мм.
![]()
где Pr - радиальная сила, Н ;
![]() - угол контакта,
- угол контакта, ![]()
![]() ,получаем:
,получаем:
где d3 – диаметр заготовки, d3=40мм.
![]()
Из миллиметровки выбираем размеры l=603.5мм, b=268.5мм, a=100мм(стандартный размер).
Т.к. в качестве опор шариковые подшипники качения, то расчетная схема представлена в виде балки на двух ножевых опорах.
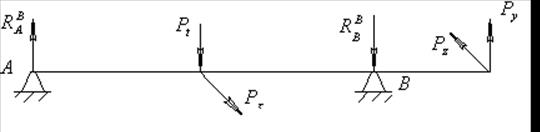
Рис. 6.6 Расчетная схема вала
2.Строим расчетные схемы с учетом плоскости действия сил (т.е. вертикальной и горизонтальной плоскости).
2.1. Вертикальная плоскость:
Строим расчетную схему в вертикальной плоскости (рис. 6.7).
Определяем реакции в опорах:
Реакция в опоре В определяется из уравнения:
![]()

Определяем реакцию в опоре А из уравнения:
Строим эпюру изгибающих моментов в этой плоскости (рис. 6.7). Для этого необходимо определить изгибающие моменты действующие в этой плоскости:
Разобьём эпюру вертикальной плоскости на 3 участка – х1, х2 и х3.
1 участок: ![]()
![]() ;
;
при ![]() :
:
![]() ;
;
при ![]() :
:
![]() ;
;
2 участок: ![]() ;
;
![]()
при ![]() :
:
![]() ;
;
при ![]() :
:
![]() ;
;
3 участок: ![]() ;
;
![]()
при ![]() :
:
![]() ;
;
при ![]() :
:

2.2.Горизонтальная плоскость:
Строим расчетную схему в горизонтальной плоскости(рис. 6.7).
Определяем реакции в опорах:
Реакция в опоре А определяется:
![]()

Реакция в опоре В определяется:

Строим эпюру изгибающих моментов в этой плоскости(рис. 6.7). Для этого необходимо определить изгибающие моменты действующие в этой плоскости:
Разобьём эпюру в горизонтальной плоскости на 3 участка – х1, х2 и х3.
1 участок: ![]()
![]() ;
;
при ![]() :
:
![]() ;
;
при ![]() :
:
![]() ;
;
2 участок: ![]() ;
;
![]() ;
;
при ![]() :
:
![]() ;
;
при ![]() :
:
![]() ;
;
3 участок: ![]() ;
;
![]()
при ![]() :
:
![]() при
при ![]() :
: 
3.Строим эпюру суммарного изгибающего момента(рис. 6.7):
![]()
 ;
;
4. Определяем приведенный момент:
![]()

5. Определяем диаметр шпинделя в самом опасном сечении:
 , где
, где ![]() -
граница выносливости (для ст. 45:
-
граница выносливости (для ст. 45: ![]() ).
).
6.10 Описание конструкций ПГД
В привод главного движения токарного станка могут входить одно- или многоскоростной асинхронный электродвигатель, а так же многоступенчатая коробка скоростей, механический вариатор или регулируемый электродвигатель постоянного тока, а так же коробка скоростей (как правило в тяжёлых токарных станках.). Иногда применяют и др. приводы (как вариант, гидравлические).
В процессе резания на токарном станке вращение заготовки осуществляется в направлении от привода главного движения. Поступательное перемещение режущего инструмента осуществляется кинематической цепью движения подачи (первое звено — шпиндель, последнее — зубчато-реечная передача или кинематическая пара ходовой винт - маточная). Настройка подачи осуществляется с помощью коробки подач либо установкой сменных зубчатых колёс узла настройки подачи — гитары станка.
7. Синтез электроавтоматики
Развитие промышленного оборудования, в том числе металлорежущих станков идет по пути повышения уровня автоматизации выполняемых операций , что предъявляет особые требования к электроавтоматике. Одновременно с увеличением объема решаемых задач при проектировании возникают проблемы, связанные с уменьшением размера станций электрооборудования , простотой его наладки, диагностикой неисправностей и их оперативным устранением, повышением надежности в работе.
Эти проблемы привели к решению задачи синтеза функций электроавтоматики на новом уровне – с использованием программных методов решения.
При синтезе принципиальных схем управления электроавтоматикой промышленных механизмов требуется привести заданные условия работы механизма к виду, удобному для анализа. Такая же задача возникает при разработке типовых схем шифраторов и дешифраторов, счетчиков, регистров и т.д. При решении этой задачи применяют циклограммы и диаграммы работы, операторы состояния и событий, карты и таблицы состояний, таблицы включений.
Многообразие логических схем устройств управления механизмами можно разделить на комбинационные схемы, в которых состояние выходных сигналов зависит только от состояния входных сигналов в данный момент времени (например это дешифраторы, шифраторы сумматоры и т.д.), и на последовательные схемы, в которых состояние выходных сигналов зависит как от состояния входных сигналов в данный момент, так и в предыдущие моменты времени , т.е. это схемы, содержащие элементы памяти.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.