











































Техническое задание
Исходные данные
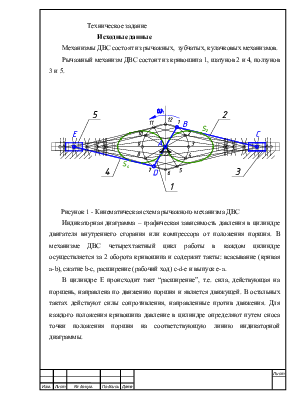
Механизмы ДВС состоят из рычажных, зубчатых, кулачковых механизмов.
Рычажный механизм ДВС состоит из кривошипа 1, шатунов 2 и 4, ползунов 3 и 5.
 Рисунок 1 - Кинематическая схема рычажного
механизма ДВС
Рисунок 1 - Кинематическая схема рычажного
механизма ДВС
Индикаторная диаграмма – графическая зависимость давления в цилиндре двигателя внутреннего сгорания или компрессора от положения поршня. В механизме ДВС четырехтактный цикл работы в каждом цилиндре осуществляется за 2 оборота кривошипа и содержит такты: всасывание (кривая a-b), сжатие b-c, расширение (рабочий ход) c-d-e и выпуск e-a.
В цилиндре Е происходит такт “расширение”, т.е. сила, действующая на поршень, направлена по движению поршня и является движущей. В остальных тактах действуют силы сопротивления, направленные против движения. Для каждого положения кривошипа давление в цилиндре определяют путем сноса точки положения поршня на соответствующую линию индикаторной диаграммы.
 Рисунок 2 – Индикаторная диаграмма
Рисунок 2 – Индикаторная диаграмма
В цилиндре С происходит такт “всасывание” и воздух всасывается из атмосферы в цилиндр. При всасывании давление ниже атмосферного.
Угловая скорость кривошипа: ω1 = 125 рад/с.
Длины звеньев АВ и АD: lAB = lAD = 0,095 м.
Длины звеньев BC и DE: lBC = lDE = 0,35 м.
Центр масс звеньев BC и DE: lBS2 = lDS4 = 0,3 lBC .
Диаметр цилиндра: dц = 100 мм.
Масса кривошипа: m1 = 27 кг.
Масса шатунов 2 и 4: m2 = m4 = 3,5 кг.
Масса ползунов 3 и 5: m3 = m5 = 1,7 кг.
Момент инерции центров масс шатунов: IS2 = IS4 = 0,015 кг·м2.
Максимальное давление: pmax = 2,3 МПа.
Коэффициент неравномерности: δ = 0,008
Зубчатый механизм
Движение коленчатого вала 1 передается на зубчатый механизм, состоящий из
планетарной ступени 1-Н с модулем ![]() , и простой 4-5 с
модулем
, и простой 4-5 с
модулем ![]()
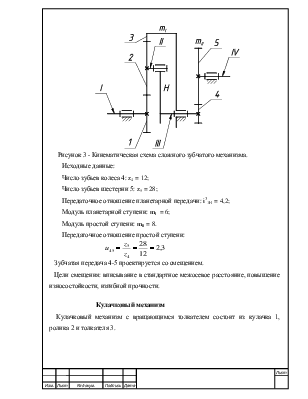
Рисунок 3 - Кинематическая схема сложного зубчатого механизма.
Исходные данные:
Число зубьев колеса 4: z4 = 12;
Число зубьев шестерни 5: z5 = 28;
Передаточное отношение планетарной передачи: i31H = 4,2;
Модуль планетарной ступени: mI = 6;
Модуль простой ступени: mII = 8.
Передаточное отношение простой ступени:
Зубчатая передача 4-5 проектируется со смещением.
Цели смещения: вписывание в стандартное межосевое расстояние, повышение износостойкости, изгибной прочности.
Кулачковый механизм
Кулачковый механизм с вращающимся толкателем состоит из кулачка 1, ролика 2 и толкателя 3.
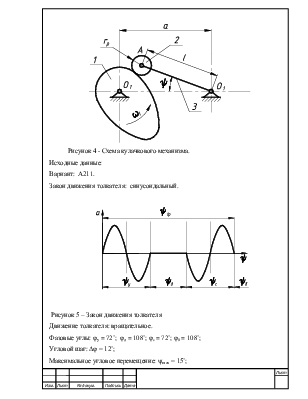
Рисунок 4 - Схема кулачкового механизма.
Исходные данные:
Вариант: А211.
Закон движения толкателя: синусоидальный.
Рисунок 5 – Закон движения толкателя
Движение толкателя: вращательное.
Фазовые углы: φу = 72˚; φд = 108˚; φс = 72˚; φб = 108˚;
Угловой шаг: ∆φ = 12˚;
Максимальное угловое перемещение: ψmax = 15˚;
Длинна коромысла: l = 80 мм
Радиус ролика: rр = 15 мм;
Допускаемые углы давления на фазе сближения:
![]() = 30˚;
= 30˚;
Допускаемые углы давления на фазе удаления: ![]() = 45˚.
= 45˚.
1. Структурный кинематический и кинетостатический анализ плоского рычажного механизма
1.1. Структурный анализ механизма
Число степеней свободы по формуле Чебышева:
![]() , (1)
, (1)
где n - число подвижных звеньев, n = 5;
p1 - число низших кинематических пар, p1 = 7
p2 - число выcших кинематических пар, p2 = 0.
![]()
Рычажный механизм имеет одно начальное звено.
Отсоединяем группы Асcура (диады) с n = 2, p = 3.
Рисунок 6 - Группы Ассура
Формула строения механизма:
![]() .
.
Данный механизм относиться ко второму классу.
1.2. План положений
Масштаб плана положений:
 ,
(2)
,
(2)
где AB – длина отрезка, изображающего длину звена; lAB – длина звена АВ.
 .
.
Длины отрезков, отображающих длины звеньев:

![]() .
.
Вычерчиваем окружность радиуса AB и делим ее на 12 частей. Из точек В, длиной ВС на направляющей откладываем засечки С. Соединяем получившиеся точки С с точками В. Из точек В на шатунах ВС длиной BS2 откладываем засечки S2 . Соединяем полученные точки S2 и получаем шатунные кривые. Аналогичные операции производим для шатуна DE.
1.3. План скоростей
Построение планов решает задачу графического определения искомых параметров.
В методе планов используют принцип известный из теоретической механике, в соответствии с которым движение точки любого звена подчиняется следующему векторному уравнению:
![]() ,
(3)
,
(3)
где ![]() - абсолютная скорость
искомой точки;
- абсолютная скорость
искомой точки;
![]() -переносная скорость;
-переносная скорость;
![]() -относительная скорость.
-относительная скорость.
Первую систему составляем для группы Ассура 2-3:
 .
(4)
.
(4)
В первом уравнение системы скорость VB направлена перпендикулярно звену АВ, VCB - перпендикулярно звену СВ, а скорость VC вдоль направляющей х-х.
 (5)
(5)
По заданной скорости VB выбираем масштаб планов скоростей:
 (6)
(6)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.