|
|
Приборы и СУ. 1997. № 5, с. УДК 681.513.6 К.10. ОСТРЕМ, д-р. проф. (Швеция)
Настройка и адаптация'
1. Введение
Управление с обратной связью позволяет получить системы, не чувствительные к возмущениям и изменениям параметров объекта. Порой изменения столь велики, что линейная обратная связь с постоянными коэффициентами неспособна совладать с проблемой. В этом случае альтернатива - адаптивное управление. Адаптивный регулятор - это, грубо говоря, регулятор, который пытается получить большую информацию о системе и ее окружении и изменить свое поведение при изменении свойств объекта или возмущениях. Обучение может быть достигнуто путем изменения параметров регулятора либо непосредственно, либо опосредованно, на основе индентификации модели процесса. В силу того что адаптивные системы способны получать информацию о свойствах объекта, адаптивные методы можно также использовать для определения параметров регулятора в тех случаях, когда последние не изменяются существенно. Они годятся и для автоматизации настройки регулятора. Это, по сути дела, наиболее распространенный способ использования адаптации. Достоинство автоматической настройки состоит в том, что в результате существенно упрощаются пусконаладка и функционирование систем.
Термин "адаптироваться" означает "изменять поведение в ответ на изменение внешних условий". Адаптивная система, таким образом,-это система, которая может изменять свое поведение при изменении внешних условий. Поскольку обычные системы с обратной связью также имеют дело с
изменяющимися условиями, необходимо провести разграничение. На протяжении многих лет были потрачены немалые усилия на поиск подходящего формального определения. Здесь мы просто скажем, что адаптивная система - это нелинейная система со специальной структурой. Адаптивное управление - естественное расширение базового контура обратной связи. Его можно рассматривать как попытку достичь более высокой степени автоматизации путем подстройки параметров регулятора в обычном контуре обратной связи. Или, иными словами, адаптивное управление позволяет автоматизировать некоторые операции, обычно выполняемые инженером по КИП для определения подходящих параметров регулятора.
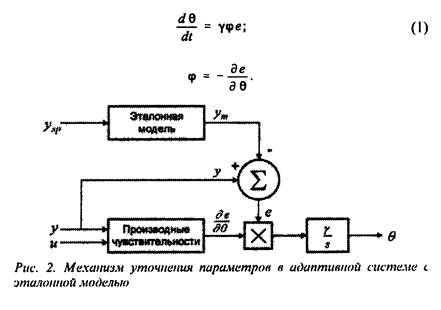
Одно из первых упоминаний об адаптивном управлении - патент на пневматический ПИД регулятор, параметры которого регулируются пневматически [29]. Исследования в области адаптивного управления активно проводились в конце 50-х - начале 60-х гг. Одним из стимулов послужила потребность в системах управления полетом сверхзвуковых летательных аппаратов. Системы с постоянным коэффициентом усиления оказывались неработоспособными при переходе в область сверхзвуковых скоростей. Другим стимулом развития стало расширение сферы компьютеризованного управления технологическими процессами. Этот период иногда называют героической эпохой, поскольку путь от идеи до ее проверки на летных испытаниях был весьма короток при минимуме теоретического анализа в промежутке. В то время зародились многие идеи адаптивного управления, в частности адаптивная схема с эталонной моделью [143] и регулятор с самонастройкой [69]. Однако развитие сдерживалось аппаратурными проблемами [51]. Регуляторы тогда реализовывались в виде специализированных аналоговых ЭВМ. На аналоговой технике было трудно добиться желаемых точности и надежности.
Адаптивному управлению существенно помогло развитие теории управления с 1950-х гг. Особенно важным был процесс в теории устойчивости и идентификации систем. Его следствием стал возросший интерес к адаптивному управлению в 70-е и 80-е гг. В этот период был внесен наибольший вклад в теорию и достигнут значительный прогресс в экспериментальной работе. Развитие стимулировалось появлением в начале 70-х гг. микропроцессоров, позволивших реализовывать адаптивные алгоритмы дешево и эффективно. Заметный прогресс наблюдался, в частности, в анализе устойчивости. Интересные результаты были получены от применения теории устойчивости по Ляпунову, а также гиперустойчивости. Важнейшую роль сыграло понятие "позитивность". Необходимые условия устойчивости важных классов адаптивных систем даны в работах [39, 48] и многих других.
Естественным было желание выяснить, что произойдет при нарушении условий устойчивости. В связи с этим появилось множество исследований по робастности адаптивного управления [1 15]. Было обнаружено, что очень важно не иметь немоделируемой динамики [62, 100, 108, 109. 112, 113].
В конце 80-х - начале 90-х гг. произошло несколько других интересных продвижений. Серьезный прогресс был достигнут в понимании многих ключевых проблем. Достаточно глубоко была изучена проблема самонастройки [53], исследованы условия сходимости [33] и переходные процессы в адаптивных системах.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.