Чтобы ознакомиться с некоторыми следствиями, связанными с адаптивным управлением, рассмотрим систему из примера 1. Пусть объект Р неизвестен; будем предполагать, что известен стабилизирующий регулятор. Параметры регулятора сохраняются постоянными, на систему подается эталонный сигнал /•() конечной продолжительности. Будем считать, что сигналы в системе успокаиваются столь быстро, что ими можно пренебречь через конечный промежуток времени. Выходной сигнал уц регистрируется. Затем он используется в качестве эталонного и подается в систему. Преобразование Далласа сигнала ошибкие задается формулой
![]()
|
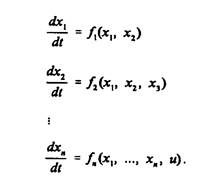
Если 0 < ехц < 2, то x(t) экспоненциально сходится к нулю при t - "о. При ехц > 2, решение x(t), однако, уходит в бесконечность за конечное время, а Приведенный пример иллюстрирует одну из трудностей, связанных с адаптивным управлением нелинейными системами. Новым методом, позволяющим избежать этих трудностей, является обратное движение. Этот метод описан в недавно изданной монографии [79], Он был первоначально разработан в качестве альтернативы линеаризации обратной связи. Метод применим к системам треугольной структуры: |
|
|
|
Закон управления получают с помощью рекурсивной процедуры, начинающейся с уравнения для х,. Он строится |
Сравнение с уравнением (2) показывает, что производная чувствительности равна
![]()
Поскольку передаточная функция С регулятора известна, можно точно найти производную чувствительности и определить параметры регулятора, обеспечивающие меньшее значение функции потерь. Таким образом, удается избежать трудностей аппроксимации, возникающих в обычных схемах адаптивного управления с эталонной моделью.
2.6. Нелинейные системы
С середины 80-х гг. наметился значительный прогресс в управлении нелинейными системами. Один из новых результатов - линеаризация обратной связи [61, 94]. Теория хорошо изложена в монографиях [65, 106]. После получения этих результатов вполне естественным стало исследование соответствующих адаптивных систем, что было сделано в работах [30,47,72,119]. Имеется множество физических задач,
в предположении, что x-i — управляющая переменная. Далее рекурсия распространяется на другие уравнения. Получаемый таким образом закон управления гарантирует стабилизацию системы. Устойчивость определяется либо по теории Ляпунова, либо по пассивности [71, 78].
Метод обратного движения был обобщен на обратную связь по выходу для систем с неизвестными параметрами [73, 80}. Интересно отметить, что, если метод применить к линейной системе с неизвестными параметрами, закон управления будет отличен от закона адаптивного управления, полученного в результате использования точностной эквивалентности [77]. Одно из отличий состоит в том, что закон управления содержит скорость изменения оценки. Это улучшает переходную характеристику [75, 81].
2.7. Не И p о ii ч ы с сет и
Представление нелинейности - ключевой момент исследования нелинейных систем. Искусственные нейронные сети -эффективный способ описания нелинейной функции нескольких переменных. Одним из приятных свойств нейронных сетей является наличие методов подгонки параметров описания к данным. Другое состоит в том, что изменение параметров влияет на функцию лишь локально. Нейронные сети использовали для нелинейного адаптивного управления самыми разными способами [28, 60, 101 и др.]. Линейная модель (3) заменяется уравнением
![]()
где нелинейная функция/представлена в виде нейронной сети с параметрами 6.
Модели в виде уравнений в пространстве состояний могут быть аналогично представлены с помощью нейронных сетей. Параметры входят усложненным образом в нормальные нейронные сети. Лучевые базисные функции дают, однако, представления, линейные по параметрам [117]. Задача идентификации эквивалентна обучению нейронной сети по входо-выходным данным. Задачи нахождения обратной модели и конструирования регуляторов на основе подгонки модели могут быть также выражены в виде аналогичной задачи обучения нейронных сетей. Нейронные модели - это модели типа "черный ящик". Их достоинство состоит в том, что описания носят весьма общий характер, недостатки - в том, что они нередко содержат множество параметров и время обучения может быть весьма велико [68, 127].
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.