Мы рассчитали оптимальные настройки ПИД–регулятора, проверим теперь систему на оптимальность, для этого увеличим и уменьшим настройки ПИД–регулятора, а именно, Кп, Ки, Кд, на 20% и посмотрим, как изменится переходной процесс.
Таблица 6 – Оптимальные и измененные настройки ПИД–регулятора
|
Настройки ПИД–регулятора |
Оптимальные настройки |
Настройки, увеличенные на 20% |
Настройки, уменьшенные на 20% |
|
Кп |
1111,5 |
1333,8 |
889,2 |
|
Ки |
165,0 |
198 |
132 |
|
Кд |
1310,0 |
1572 |
1048 |
Переходные процессы показаны на рисунке 14.
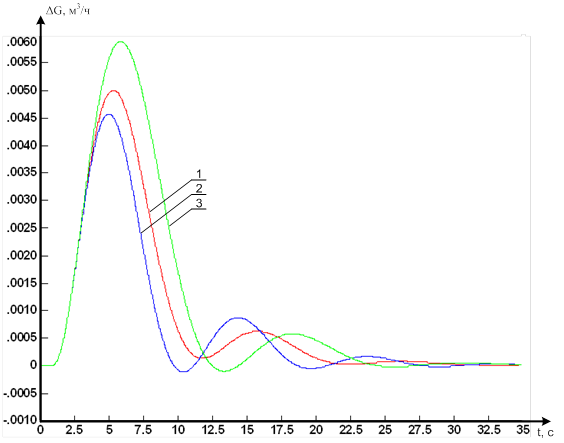
Рисунок 14 – Переходные процессы в системе: 1 – с оптимальными настройками ПИД–регулятора; 2 – с увеличенными на 20% настройками ПИД–регулятора; 3 – с уменьшенными на 20% настройками ПИД–регулятора
Определим показатели качества полученных процессов, для удобства их восприятия полученные данные сведем в таблицу 7.
Таблица 8 – Сравнительный анализ показателей качества ПП
|
Показатели качества |
Переходной процесс |
||
|
С оптимальными настройками ПИД–регулятора |
С увеличенными на 20% настройками ПИД–регулятора |
С уменьшенными на 20% настройками ПИД–регулятора |
|
|
Максимальное динамическое отклонение ΔG1, м3/ч |
0,005 |
0,0058 |
0,0046 |
|
Статическая ошибка ΔGст, % |
0 |
0 |
0 |
|
Время регулирования tр, с |
20,5 |
25 |
27 |
|
Величина перерегулирования η, % |
0 |
1,2 |
0 |
Анализ: переходной процесс с оптимальными настройками лучше, чем с увеличенными и уменьшенными настройками, так как ухудшаются показатели качества, а именно, увеличивается время регулирования, максимальное динамическое отклонение, появляется перерегулирование.
Для построения переходного процесса по заданию воспользуемся пакетом VisSim. Полученный переходной процесс представлен на рисунке 15.
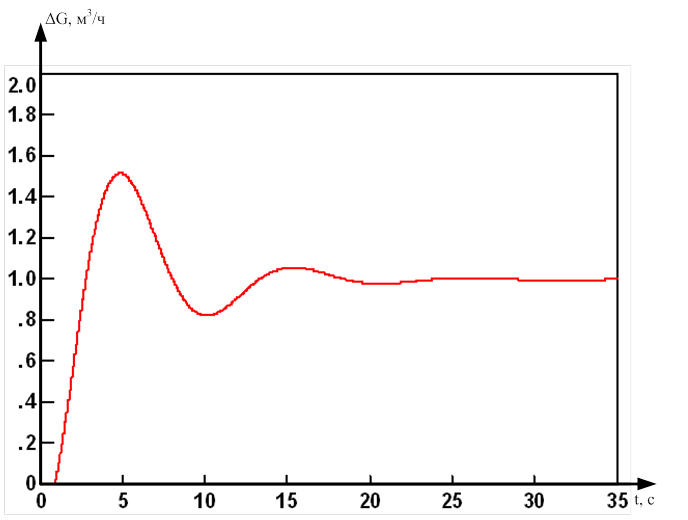
Рисунок 18 – Переходной процесс в системе при возмущении по заданию
Параметры переходного процесса в этом случае будут следующими:
– максимальное динамическое отклонение: ΔG1 = 1,55 м3/ч;
– статическая ошибка: ΔGст = 0;
– время регулирования: tр = 19 с;
– величина перерегулирования: η=50%.
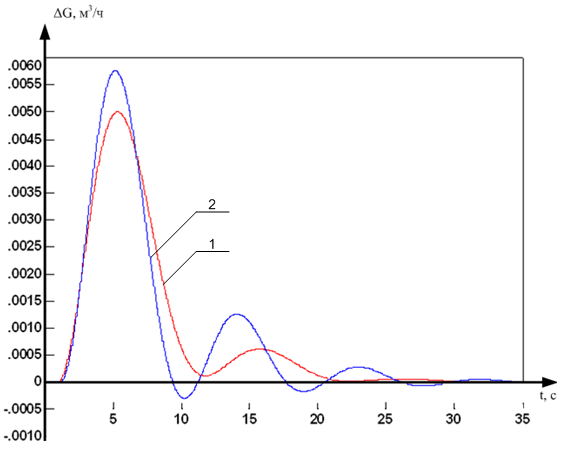
Зачастую параметры объекта управления определены с ошибкой или изменяются во времени. В этих условиях необходимо проверять рассчитанную систему на нечувствительность (грубость) к возможным вариациям параметров системы для наихудших условий. Для проверки нашей системы специально изменим её параметры, а именно, увеличим их на 20%, и посмотрим, как будет выглядеть переходной процесс в системе. Конечно, нас будут интересовать показатели качества переходного процесса, то есть качество регулирования системы, при изменения параметров объекта, ведь изменять мы будем именно их: Коб и τоб. На рисунке 16 представлен переходной процесс с увеличенными параметрами объекта.
Рисунок
16 – Проверка системы на грубость, переходные процессы: 1 – с исходными
параметрами объекта(Коб=0,01![]() , τоб=0,9 с); 2 – с
увеличенными на 20% параметрами объекта (Коб=0,012
, τоб=0,9 с); 2 – с
увеличенными на 20% параметрами объекта (Коб=0,012![]() , τоб=1,08 с)
, τоб=1,08 с)
Определяем по графику параметры переходного процесса с увеличенными на 20% Коб и τоб:
– максимальное динамическое отклонение: ΔG1 = 0,06 м3/ч;
– статическая ошибка: ΔGст = 0;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.