Далее
 (10)
(10)
Таким образом, передаточная функция объекта будет иметь вид:

Для определения точности аппроксимации экспериментальной переходной функции решением дифференциального уравнения с запаздывающим аргументом рассчитываем ординаты аппроксимирующей кривой:
 ,
(11)
,
(11)
Результаты расчетов приведены в таблице 4, а нормированная и аппроксимирующая нормированная кривые показаны на рисунке 8.
Таблица 4 – Ординаты аппроксимирующей нормированной переходной функции
|
t,c |
0,0 |
0,9 |
2,5 |
5,0 |
7,5 |
10,0 |
12,5 |
15,0 |
|
ΔGнап2(t) |
0,000 |
0,000 |
0,000 |
0,167 |
0,327 |
0,479 |
0,607 |
0,709 |
Окончание таблицы 4
|
17,5 |
20,0 |
22,5 |
25,0 |
27,5 |
30,0 |
32,5 |
|
0,788 |
0,847 |
0,890 |
0,922 |
0,945 |
0,961 |
0,973 |
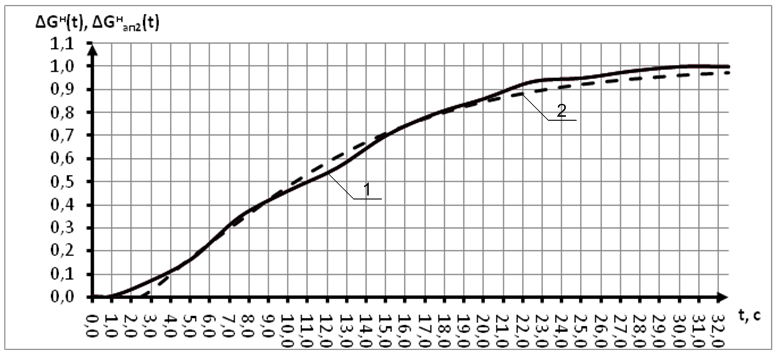
Рисунок 8 – График переходных функций: 1 – нормированная, снятая экспериментально, 2 – нормированная, построенная по второй аппроксимации
Найдем среднеквадратическую ошибку аппроксимации:
 , (12)
, (12)
Так как погрешность аппроксимация меньше 3%, окончательно принимаем передаточную функцию объекта в виде:

Для выбора закона регулирования (типа регулятора) воспользуемся аппроксимацией объекта решением дифференциального уравнения первого порядка с запаздывающим аргументом.
По отношению
|
|
(13) |
из таблицы 2.1 [3] выбираем непрерывный регулятор.
Затем, рассчитываем динамический коэффициент регулирования по формуле:
|
|
(14) |
По графику (рисунок 2.3 [3]) определяем, что Rд = 0,2 для требуемого вида переходного процесса, а именно, апериодического, может обеспечить ПИД –регулятор.
По графику (рисунок 2.4 [3]), находим для ПИД–регулятора отношение:
|
|
(15) |
Откуда время регулирования tр=5·2,84 = 14,2 с, что меньше допустимого времени регулирования 24с.
Поэтому окончательно выбираем ПИД – регулятор.
Предварительно, с целью определения варьирования настроек, рассчитываем коэффициент передачи регулятора Кр, время изодрома Ти и время предварения Тд по приближенным формулам (таблица 2.2 [3]).
Для переходного процесса апериодического:
|
|
(16) |
|
|
Расчет оптимальных настроек регулятора произведем с помощью пакета прикладных программ MATLAB 7.0.1.
Для построения переходного процесса по заданию воспользуемся программным продуктом MATLAB7 и пакетом ControlSystemToolbox, который является одним из основных инструментариев разработчика систем управления в среде MATLAB 7. Это сборник алгоритмов MATLAB для моделирования, анализа и проектирования СУ. В пакете используются как и традиционные методы ТАУ с использованием передаточных функций, так и современные методы с использованием пространства состояния. В среде ControlSystem Toolboxможно моделировать и анализировать как непрерывные, так и дискретные СУ. Легко могут быть вычислены и отображены на экране отклики системы в частотной и временной областях, диаграммы расположения нулей/полюсов.
Основные свойства пакета ControlSystem:
Формы представления:
– Непрерывные и дискретные СУ;
– Форматы моделей: передаточные функции (ПФ), пространство состояний (ПС), нули-полюса (НП);
– Построение линейных моделей СУ;
– Преобразование моделей в различные форматы: ПФ, НП, ПС.
Анализ:
– Полный набор средств для анализа одно– (SISO) и многомерных (MIMO) систем;
– Временные характеристики: переходная и импульсная переходная характеристики, реакция системы на произвольное воздействие;
– Частотные характеристики: диаграммы Боде (АЧХ, ФЧХ), Найквиста и Никольса (АФХ) и др.
Проектирование:
– Расчет параметров обратной связи;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.