Максимальная ошибка идентификации по модулю равна ![]() ,
что больше 5%. Следовательно, данный метод идентификации для дальнейших
расчетов не подходит.
,
что больше 5%. Следовательно, данный метод идентификации для дальнейших
расчетов не подходит.
3. Выбор регулятора
3.1 Выбор типа регулятора.
Передаточная функция, полученная наиболее точным методом аппроксимации, имеет вид:
![]()
Выбираем такой регулятор, конструктивно – техническое оформление которого удовлетворяло бы требованиям надёжности, работоспособности применительно к конкретным условиям производства:
Гидравлический регулятор не подходит для данной системы, так как его недостатками является: небольшой радиус действия, огнеопасность, зависимость рабочих характеристик от температуры, что крайне не допустимо в нашем случае.
Пневматические регуляторы так же не могут быть применены в связи с неудовлетворением требования пожаровзрывобезопасности и необходимости наличия сжатого воздуха соответствующего качества, а так же сравнительно небольшая протяженность импульсных и командных линий.
Электрические регуляторы, наиболее широко распространенные в пожаровзрывоопасных помещениях, удовлетворяют требованиям нашего объекта. «Плюсом» этих регуляторов является то, что велика протяжённость командных и импульсных линий (более 300 м).
Ориентировочный принцип действия регулятора определяют по величине соотношения:
t/T =0,4/1,1=0,36.
Если ![]() ,
то позиционный регулятор
,
то позиционный регулятор
Если ![]() ,
то регулятор непрерывного действия
,
то регулятор непрерывного действия
Если ![]() ,
то многоконтурная система регулирования
,
то многоконтурная система регулирования
Поскольку непрерывные регуляторы применяют для объектов как обладающих, так и не обладающих самовыравниванием, для одно- и много-емкостных объектов, имеющих малое и значительное запаздывание при плавно меняющейся нагрузке. Условие применения этого регулятора 0,2<t/T<1 . В нашем случае выбирается регулятор непрерывного действия.
Под выбором типа регулятора подразумевается выбор простейшего закона регулирования, наиболее дешевого и простого в эксплуатации, обеспечивающего при различных возмущениях, в заданных пределах динамическую ошибку, время регулирования и статическую ошибку. Значение этих параметров выбирается в соответствии с требованиями технологии. В качестве заданного выбирают один из типовых переходных процессов.
По техническим условиям перерегулирование переходной характеристики замкнутой системы не должно превышать 5%, что меньше 20% перерегулирования. В соответствии с требованиями технологии, рассматриваемый переходной процесс является апериодическим.
3.2 Выбор закона регулирования по номограммам.
Закон регулирования выбирается с учетом свойств объекта регулирования и заданных параметров качества переходного процесса. К качеству регулирования каждого конкретного технологического процесса, имеющего только ему присущие особенности, предъявляются конкретные требования.
Рис. 3.2.1 Кривая к выбору времени t1*
t1* - время в течении которого желательно окончание переходного процесса.
t1* = 3 мин.
T=1,1 мин
t = 0,4 мин
Тогда t1* /t = 10; t/T=0,36
Выбираем закон регулирования по номограмме (рис.3.2.2):
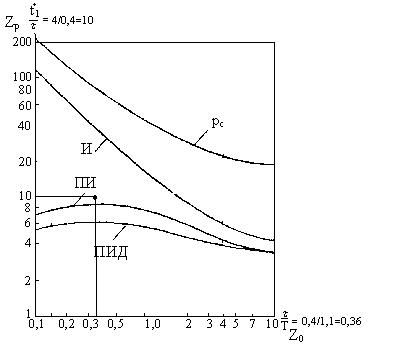
Рис 3.2.2 Номограмма для выбора закона регулирования
По номограмме видно, что точка находиться между И и ПИ регуляторами, однако она лежит ближе к зоне ПИ регулятора, поэтому в данном случае выберем его.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.