Re![]() (m,w) Im
(m,w) Im![]() (m,w) + Re
(m,w) + Re![]() (m,w) Im
(m,w) Im![]() (m,w) = 0
(m,w) = 0
Решая данную систему относительно действительной и мнимой части РАФЧХ регулятора, получим:
|


d) Из методического пособия по таблице 2.1. находим:
![]()
![]()
e) Подставляя различные частоты от 0 до значения, при котором С0 становится
отрицательным, строим зависимость С0=f(C1).
m=0.221
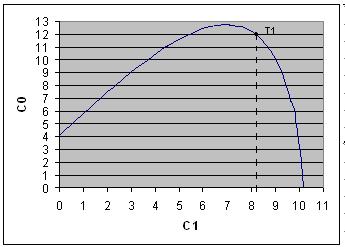
C0=12 и C1=8,1
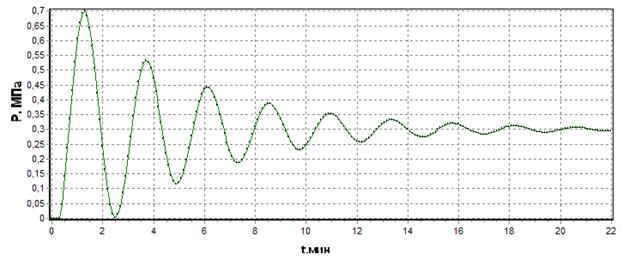
Задаваясь значениями w с помощью программного обеспечения EXCEL построим переходную характеристику замкнутой системы.
m=0.366
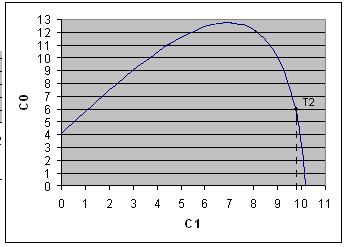
C0=6 и C1=9,8
Задаваясь значениями w с помощью программного обеспечения EXCEL построим переходную характеристику замкнутой системы.
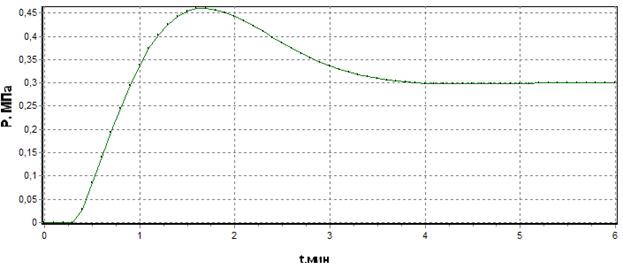
Рис5.1.4 Переходной процесс САР с настройками регулятора
Из двух характеристик наилучшей является вторая со значениями C0=6 и C1=9,8
5. Определение качества регулирования
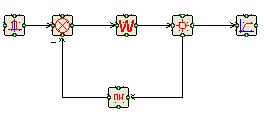
Функциональная схема:
1. Для табличного способа :
1) Время переходного процесса tp
характеризует быстродействие системы и определяется какинтервал времени
от начала переходного процесса до момента, когда отклонение выходной величины
от ее установившегося значения становиться меньше 5%![]() )
)
Находим время из графика по рис 5.1.1.
С помощью
программы ModelCad получаем переходную характеристику
замкнутой системы: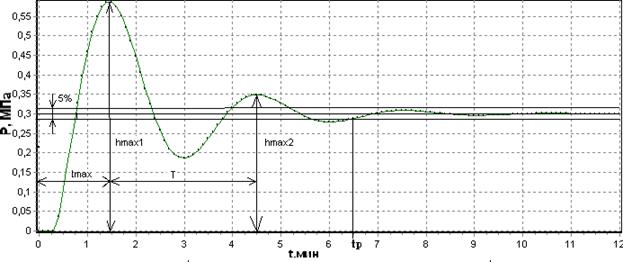
I. Косвенные показатели.
Интегральная оценка I= =
=![]()
II. Прямые показатели качества.
По графику видно, что время переходного процесса tp=6,5 мин. (![]() )Данный показатель
не удовлетворят необходимым условиям технологического процесса(
)Данный показатель
не удовлетворят необходимым условиям технологического процесса(![]() ).
).
2) Перерегулирования – это максимальное отклонение в переходный период.
Перерегулирование характеризует динамическую ошибку регулирования.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.