![]() (2.8)
(2.8)
На основе (2.8) можно записать систему уравнений:
 (2.9)
(2.9)
Передаточная функция по управляющему воздействию:
 (2.10)
(2.10)
где ![]() - передаточный
коэффициент разомкнутой системы.
- передаточный
коэффициент разомкнутой системы.
Изображение выходного
сигнала: ![]() (2.11)
(2.11)
Для определения передаточной
функции системы по возмущающему воздействию можно положить ![]() .
.
Передаточная функция по возмущающему воздействию:
 (2.12)
(2.12)
где ![]() передаточный
коэффициент по возмущающему воздействию.
передаточный
коэффициент по возмущающему воздействию.
Изображение выходного
сигнала: ![]() (2.13)
(2.13)
Используя принцип суперпозиции, на основе (2.11) и (2.13) окончательно можно записать:
![]() (2.14)
(2.14)
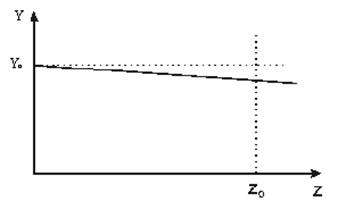
3. Статический расчет.
Пусть ![]() . Значит рассмотрим исходную
разомкнутую систему без обратной связи. Тогда на основе (2.14), с учетом теорем
операционного исчисления о предельных значениях при
. Значит рассмотрим исходную
разомкнутую систему без обратной связи. Тогда на основе (2.14), с учетом теорем
операционного исчисления о предельных значениях при ![]() можно
записать уравнение статики вида:
можно
записать уравнение статики вида:
![]() (3.1)
(3.1)
где ![]() -
полезная составляющая выходного сигнала в разомкнутой системе;
-
полезная составляющая выходного сигнала в разомкнутой системе;
![]() =
= ![]() - величина, на которую уменьшается
выходной сигнал в разомкнутой системе из-за влияния возмущающего воздействия.
- величина, на которую уменьшается
выходной сигнал в разомкнутой системе из-за влияния возмущающего воздействия.
В соответствии с таблицей (1.1) и формулой (3.1) можно рассчитать погрешность стабилизации выходного сигнала в разомкнутой системе:
![]() где
где
![]() -
максимальное значение возмущающего воздействия.
-
максимальное значение возмущающего воздействия.
В соответствии с (3.1)
можно записать: ![]()
Пусть ![]()
 |
Требуемая точность
стабилизации выходной координаты в статическом режиме составляет ![]() . Поскольку
. Поскольку ![]() ,
то разомкнутая система должна быть заменена замкнутой системой автоматической
стабилизации.
,
то разомкнутая система должна быть заменена замкнутой системой автоматической
стабилизации.
Подставляя
![]() в (2.14), с учетом
в (2.14), с учетом ![]() и
и ![]() можно
записать:
можно
записать:
![]() , (3.2)
, (3.2)
где ![]() ,
, ![]() =
=![]() .
.
Поскольку задание на проектирование предполагает выполнение в замкнутой системе условия вида:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.