![]() (6.12)
(6.12)
а) полностью поворотное ПГО: ![]() определяется по формуле (6.8);
определяется по формуле (6.8);
б) отклоняются рули высоты, стабилизатор
неподвижен: ![]() определяется по формуле (6.9);
определяется по формуле (6.9);
в) отклоняются одновременно стабилизатор и рули
высоты: ![]() определяется по формуле (6.10).
определяется по формуле (6.10).
![]() во всех случаях определяется по формуле
(6.11).
во всех случаях определяется по формуле
(6.11).
Знак величин ![]() ,
,![]() . определяется знаком угла отклонения управляющих
поверхностей ПГО (
. определяется знаком угла отклонения управляющих
поверхностей ПГО (![]() ,
, ![]() ):
):
![]()
![]()
6.3 Коэффициент подъемной силы самолета при его балансировке
6.3.1 Аэродинамическая компоновка нормальной схемы,
а) Статический устойчивый самолет (![]() ) (рис. 6.1)
) (рис. 6.1)
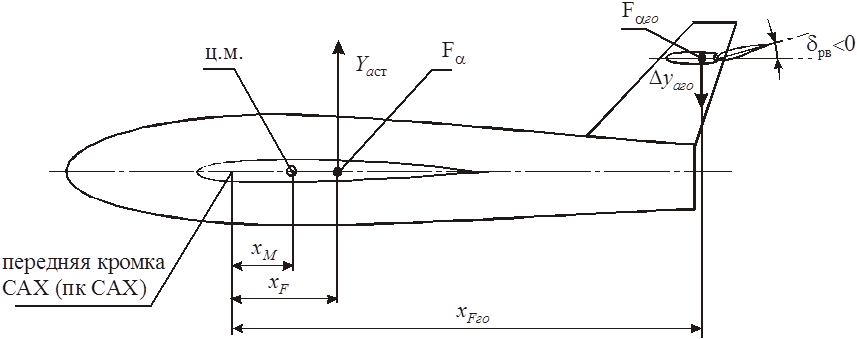
Рис 6.1
 (6.13)
(6.13)
![]()
В пределах малых углов атаки ![]()
где  (6.13/)
(6.13/)
б) статически неустойчивый самолет (![]() )(рис. 6.2)
)(рис. 6.2)
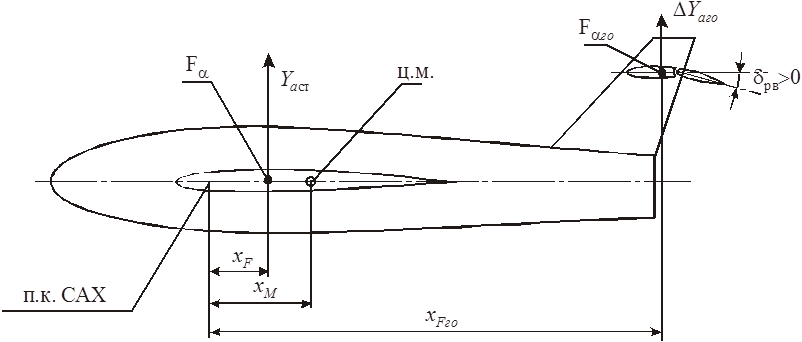
Рис 6.2
 (6.14)
(6.14)
![]()
В пределах малых углов атаки ![]()
где  (6.14/)
(6.14/)
6.3.2. Аэродинамическая компоновка схемы "утка".
а) статический устойчивый самолет (![]() ) (рис. 6.3)
) (рис. 6.3)
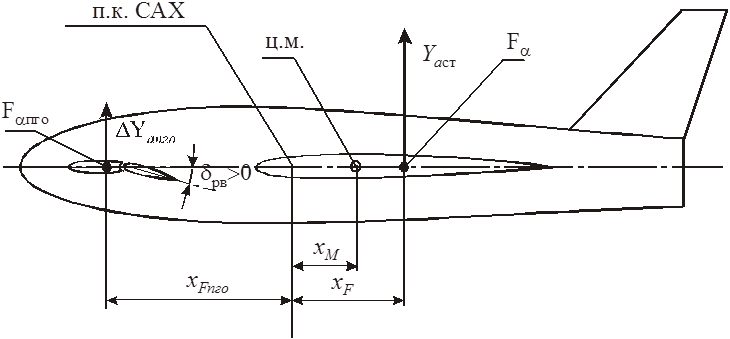
Рис 6.3
 (6.15)
(6.15)
![]() ,
, 
В пределах малых углов атаки ![]() и
и![]()
где  (6.15/)
(6.15/)
б) статически неустойчивый самолет (![]() )(рис. 6.4)
)(рис. 6.4)
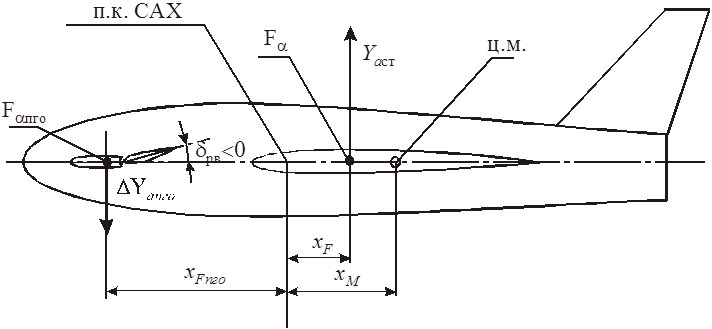
Рис 6.4
 (6.16)
(6.16)
![]()
В пределах малых углов атаки ![]() и
и![]()
где 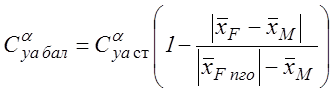 (6.16/)
(6.16/)
6.4 Определение балансировочных углов атаки.
6.4.1. Построение зависимости ![]() при известном значении
при известном значении ![]()
(рис. 6.5).
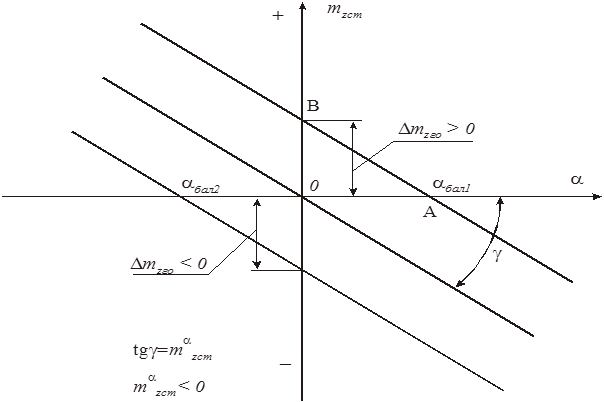
Рис. 6.5
6.4.2. Определение ![]() или
или
![]()
 (6.17)
(6.17)
где ![]() определяется по
формулам (6.4), (6.6), (6.7),
определяется по
формулам (6.4), (6.6), (6.7), ![]() - формулам (6.8),
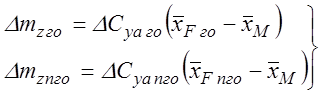
(6.9), (6.10). Для нормальной аэродинамической компоновки изменение
коэффициента момента тангажа
- формулам (6.8),
(6.9), (6.10). Для нормальной аэродинамической компоновки изменение
коэффициента момента тангажа ![]() от отклонения
управляющих поверхностей на угол
от отклонения
управляющих поверхностей на угол ![]() или
или ![]() (отклонение против часовой стрелки),
(отклонение против часовой стрелки), ![]() при
при ![]() или
или ![]() (отклонение по часовой стрелке).
(отклонение по часовой стрелке).
В случае отклонения ПГО на угол![]() или
или ![]() -
- ![]() , при
, при ![]() или
или ![]() -
- ![]() .
.
6.4.3 Определение![]() . На графике
. На графике ![]() (Рис. 6.5) отложить по оси
(Рис. 6.5) отложить по оси ![]() , значение
, значение ![]() или
или ![]() при значениях
при значениях![]() (
(![]() ) или
) или ![]() (
(![]() ) и провести прямые, параллельные зависимости
) и провести прямые, параллельные зависимости ![]() . Точки пересечения этих прямых с осью
углов атаки определяет значения углов атаки
. Точки пересечения этих прямых с осью
углов атаки определяет значения углов атаки ![]() (
(![]() при
при ![]() ,
, ![]() при
при ![]() ).
Балансировочный угол атаки можно определить из DАОВ (рис.6.5).
).
Балансировочный угол атаки можно определить из DАОВ (рис.6.5).
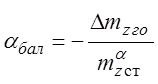 (6.18)
(6.18)
при этом необходимо проследить размерность ![]() [1/Град] или
[1/рад]. Размерность
[1/Град] или
[1/рад]. Размерность ![]() определяется размерностью
определяется размерностью ![]() .
.
6.4.4. Определение![]()
![]() - формулы (6.13/),(6.14/),(6.15/),(6.16/),
- формулы (6.13/),(6.14/),(6.15/),(6.16/),![]() - по графику рис.5 или формула(6.19).
- по графику рис.5 или формула(6.19).
6.5. Построение балансировочной поляры
самолета при ![]() .
.
6.5.1. Построение исходной поляры (обе ветви поляры при ![]() и
и ![]() ) в соответствии с проведенным расчётом при
неотклоненных рулевых поверхностях. При этом предполагалось
) в соответствии с проведенным расчётом при
неотклоненных рулевых поверхностях. При этом предполагалось ![]() ,
, ![]() , т.к.
эквивалентная схема компоновки заданного самолета симметрична относительно
плоскости XОZ. Исходная поляра 1 на рис.6.6
, т.к.
эквивалентная схема компоновки заданного самолета симметрична относительно
плоскости XОZ. Исходная поляра 1 на рис.6.6
6.5.2 Определение  .
.
![]() - приращение коэффициента сопротивления от отклонения управляющих поверхностей в продольной плоскости.
Аналогично
- приращение коэффициента сопротивления от отклонения управляющих поверхностей в продольной плоскости.
Аналогично 
![]() ,
, ![]() -
коэффициенты изолированных консолей ГО и ПГО.
-
коэффициенты изолированных консолей ГО и ПГО.
6.5.3. Построение балансировочной поляры
самолета нормальной аэродинамической компоновки при ![]() .
.
1) По оси ![]() откладывается
от т. О
откладывается
от т. О ![]() или
или ![]() .
.
2) По оси ![]() от
точки
от
точки ![]() откладывается
значение
откладывается
значение ![]() при
при ![]() , точки О" и
О' на рис. 6.6
, точки О" и
О' на рис. 6.6
3) Построение поляр 2 и 3: смещение поляры 1
таким образом, чтобы т. О совпала с т. О¢ -
поляра 2 и с т. О" - поляра 3, На полярах 3 и 2 точки А и В,
соответствующие ![]() самолета
при
самолета
при ![]() .
.
4) Точки АОВ соединяются. Полученная
кривая - балансировочная поляра. В т. О касательная к этой поляре
перпендикулярна оси ![]() . Отвал балансировочной поляры
. Отвал балансировочной поляры ![]() , больше отвала исходной поляры 1,
что определяет потери на балансировку.
, больше отвала исходной поляры 1,
что определяет потери на балансировку.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.