В исходном положении перед началом автоматического цикла корпус цилиндра Ц1 находится в крайнем левом положении. Датчик S1 нажат. Поршни цилиндров Ц2 и Ц3 находятся в верхних положениях. Датчики S3 и S5 нажаты. При этом датчики S2, S4 и S6 отжаты. Первоначальный пуск автоматического цикла осуществляется кнопкой "Пуск". Когда исполнительные механизмы манипулятора приходят в исходное состояние, последним срабатывает датчик S1. Сигнал с него используется для возобновления автоматического цикла.
При достижении манипулятором исходного состояния
в автоматическом цикле срабатывает датчик S1. Датчик S1 выдает сигнал x1, вырабатываются команды ![]() и
у3. При этом электромагнит Y1 выключается, а Y3 включается. Цилиндр Ц1 останавливается, а поршень цилиндра Ц2
опускается вниз. В начале движения датчик S3 выключается, а в конце движения S4 включается и подает сигнал x4. Вырабатывается команда у4. Электромагнит
Y4 включается. Поршень цилиндра
Ц3 перемещается вниз. В начале движения выключается датчик S5, а в конце включается датчик S6. Происходит захват заготовки
схватом. Датчик S6
вырабатывает сигнал x6. Команда
и
у3. При этом электромагнит Y1 выключается, а Y3 включается. Цилиндр Ц1 останавливается, а поршень цилиндра Ц2
опускается вниз. В начале движения датчик S3 выключается, а в конце движения S4 включается и подает сигнал x4. Вырабатывается команда у4. Электромагнит
Y4 включается. Поршень цилиндра
Ц3 перемещается вниз. В начале движения выключается датчик S5, а в конце включается датчик S6. Происходит захват заготовки
схватом. Датчик S6
вырабатывает сигнал x6. Команда ![]() приводит к выключению электромагнита Y3. Поршень цилиндра Ц2
перемещается вверх. В начале движения выключается датчик S4, а в конце включается датчик S3 и т.д. При выполнении работы
описание автоматического цикла должно быть полным.
приводит к выключению электромагнита Y3. Поршень цилиндра Ц2
перемещается вверх. В начале движения выключается датчик S4, а в конце включается датчик S3 и т.д. При выполнении работы
описание автоматического цикла должно быть полным.
2. Построение циклограммы автоматического цикла работы объекта
По результатам формализованного описания построена циклограмма автоматического цикла работы автоматизированного объекта (рисунок 3).
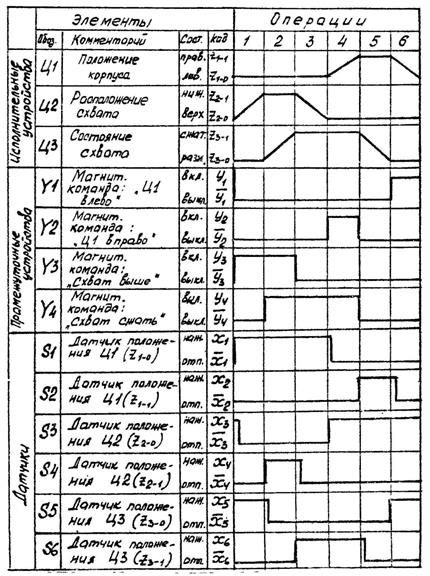
Рисунок 3 – Циклограмма автоматического цикла работы объекта
3. Разработка принципиальной электрической схемы управления
Электрическую схему разрабатываем на основании циклограммы. Сначала составляем таблицу последовательных состояний для каждого из электромагнитов Y1-Y4 (таблица 10), включая в них те датчики, которые необходимы для управления электромагнитами.
Таблица 10 – Последовательные состояния электромагнитов
|
Опер. |
1 |
2 |
3 |
4 |
5 |
6 |
||
|
y1 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
|
x1 |
1 |
1 |
1 |
1 |
1 |
0 |
0 |
0 |
|
x5 |
1 |
1 |
0 |
0 |
0 |
0 |
0 |
1 |
а)
|
Опер. |
1 |
2 |
3 |
4 |
5 |
6 |
|||
|
y2 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
|
x2 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
0 |
|
x3 |
1 |
0 |
0 |
0 |
1 |
1 |
1 |
1 |
1 |
|
x6 |
0 |
0 |
0 |
1 |
1 |
1 |
0 |
0 |
0 |
б)
|
Опер. |
1 |
2 |
3 |
4 |
5 |
6 |
||
|
y3 |
1 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
|
x1 |
1 |
1 |
1 |
1 |
0 |
0 |
0 |
0 |
|
x6 |
0 |
0 |
1 |
1 |
1 |
1 |
0 |
0 |
в)
|
Опер. |
1 |
2 |
3 |
4 |
5 |
6 |
|||
|
y4 |
0 |
1 |
1 |
1 |
1 |
0 |
0 |
0 |
0 |
|
x2 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
0 |
|
x4 |
0 |
1 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
|
x6 |
0 |
0 |
1 |
1 |
1 |
1 |
0 |
0 |
0 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.