Установка содержит (рисунки 3.1, 3.2, 3.3) перемещающуюся по рельсовому пути тележку 1, на которой размещены телескопический подъемник 2, установленный на опорной подвижной раме 16 с винтовым приводом 17, пневмогидроусилитель 4, панель 19 с пультам управления в виде кранов (14,11) с воздухопроводами и маслопроводами. На штоке телескопического подъемника 2 шарнирно закреплен гидровыжимной блок 5, выполненный в виде платформы (20) с двумя опорами под тяговый хомут, на одном конце которой с торца закреплена упорная плита (21) с шарнирно установленными на ней захватами (22) фрикционных клиньев поглощающего аппарата и горизонтально закрепленным силовым цилиндром (12), плунжер (23) которого выполнен в виде клина (24) тягового хомута со скосом, подпружиненного пружинами (25), которые закреплены на конце плунжера натяжными болтами (26) и упорной плите (21), а снизу плунжер оборудован кронштейном (27) с роликами (28), проходящим через прорезь нижней поверхности силового цилиндра и обкатывающимися по нижней наружной поверхности силового цилиндра (12) квадратной формы.
3.2 Расчет основных элементов
Расчёт диаметра пневмоцилиндра.
Предварительно находится требуемое усилие, развиваемое на штоке пневмоцилиндра:
 , кН
(3.1)
, кН
(3.1)
где K – усилие необходимое для подъема упряжного устройства, К=7 кН;
h - коэффициент полезного действия , h = 0,95.
 кН.
кН.
Определяем диаметр пневмоцилиндра по формуле:
d ц = 1,12  , мм
(3.2)
, мм
(3.2)
где Рц - давление в пневмоцилиндре, МПа Рц = 0,4 МПа;
![]() -
коэффициент полезного действия,
-
коэффициент полезного действия, ![]() =0,98
=0,98
F1 - усилия возвратной пружины пневмоцилиндра, кН.
Усилия возвратной пружины пневмоцилиндра рассчитывается по формуле:
F1= F0 + Ж1 lш ,кН (3.3)
где F0 , Ж1 - усилия предварительного нажатия и жесткости пружины;
lш - ход штока пневмоцилиндра, 190 мм.
F1= 1,56 + 6,54×10-3×190 = 2,8 кН
Тогда диаметр пневмоцилиндра составит
![]() dц =
dц =  мм
мм
Принимаем стандартный пневмоцилиндр с внутренним диаметром dц = 356 мм и толщиной стенки 4 мм.
Расчет пневмоцилиндра на допускаемые напряжения
Стальной цилиндр, внутренний радиус которого Rв = 178 мм и наружный
Rн = 182 мм подвергается внутреннему давлению Рв = 0,8 МПа.
Схема действия распорных сил внутри цилиндра приведена в соответствии с рисунком 3.5.
Рисунок 3.5 – Схема действия распорных сил внутри цилиндра
Построим эпюры напряжения
сжатия и растяжения, ![]() и
и ![]() и проверим прочность при
допускаемом напряжении
и проверим прочность при
допускаемом напряжении  =20 МПа
=20 МПа
Определим увеличение внутреннего и наружного радиуса цилиндра.
Исходные данные:
Pв=0,8 МПа ; Pн=0; Rв=17,8см; Rн=18,2см.
Внутреннее напряжение сжатия ![]() , МПа, вычисляется по формуле
, МПа, вычисляется по формуле
![]() =
= (3.1)
(3.1)
По расчёту
![]() =
= МПа.
МПа.
Внутреннее напряжение растяжения![]() , МПа, вычисляется по формуле
, МПа, вычисляется по формуле
![]() =
= (3.2)
(3.2)
По расчёту
![]() =
=
При R=Rв=17,8 см
![]() =
- 0,594 МПа
=
- 0,594 МПа
![]() =13,521
МПа
=13,521
МПа
Посчитаем внутренние напряжения возникающие по середине толщины стенки цилиндра, т.е. возьмём R=17,8+0,2=18,0 см.
Расчёт ведём по формулам [3.1] и [3.2].
По расчёту
![]() =
=
![]() =
=
При R=Rв=18,2 см
![]() =
- 0,287 МПа.
=
- 0,287 МПа.
![]() =13,214 МПа.
=13,214 МПа.
Посчитаем внутренние напряжения возникающие на наружной стенки цилиндра, т.е. возьмём R=17,8+0,4=18,2 см.
Расчёт ведём по формулам [3.1] и [3.2].
По расчёту
![]() =
=
![]() =
=
При R=Rв=18,2 см
![]() =
0 МПа.
=
0 МПа.
![]() =12,927 МПа
=12,927 МПа
Рисунок 3.6 - Эпюры напряжения радиальных и кольцевых нормальных сил
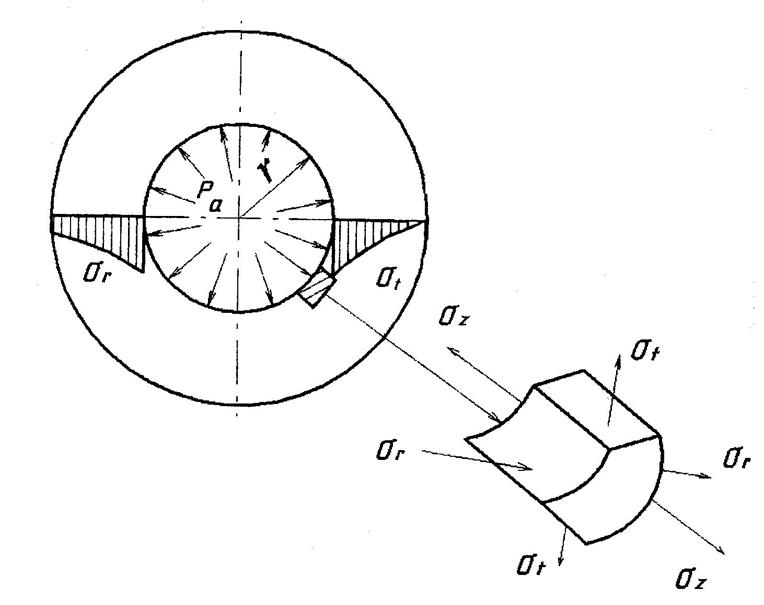
![]() -
внутреннее давление,
-
внутреннее давление, ![]() - внутренний радиус
цилиндра.
- внутренний радиус
цилиндра.
Напряжения:
![]() - нормальное радиальное,
- нормальное радиальное, ![]() - нормальное кольцевое,
- нормальное кольцевое, ![]() - на площадке,
- на площадке,
перпендикулярной к оси цилиндра.
Рисунок 3.7 – Эпюры внутренних напряжений по толщине цилиндра
Опасными являются точки у внутренней поверхности цилиндра, в которых действуют главные напряжения.
13,521 + 0,594 =14,115 МПа ≤ 20 МПа
Следовательно, прочность цилиндра достаточна, т.к. она не превышает допустимого напряжения и деформации испытывающие цилиндр не повлияют на его нормальную работу.
3.3 Технология использования установки
Принцип действия установки основан на том, что производится сжатие только пружин поглощающего аппарата в кармане хребтовой балки, минуя фрикционную часть, с помощью гидровыжима. Необходимое усилие сжатия пружин поглощающего аппарата создается на плунжере силового цилиндра от давления масла, создаваемого в пневмогидроусилителе.
Принцип действия автоматических шарнирных захватов (22) гидровыжимного блока основан на захвате фрикционных клиньев (32) поглощающего аппарата (33) захватами (22) при их подъеме и взаимодействии с предохранительными планками вертикальных стенок кармана хребтовой балки клиновых кулачков захватов (22), а также с опорной плитой (31) в момент поджатия гидровыжимного блока к карману (40) хребтовой балки.
Работа установки при смене поглащающих аппаратов типа Ш-1-ТМ и Ш-2В
Установка работает следующим образом. По рельсовому пути тележка подается под карман (40) хребтовой балки поднятого вагона с поглощающим аппаратом для его замены. Перед подключением установки к пневмосети проверяется положение кранов (3,10,14,11), которое должно соответствовать положению - «закрыто». С помощью гибкого шланга с кулачком установленного на тележке установка подключается к пневмосети. Перед сменой поглощающего аппарата осмотрите и установите его тип, состояние и положение фрикционных клиньев.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.