В схемах автоматики наряду с рассмотренными выше двухполюсными ВТ применяются также многополюсные.
|
|
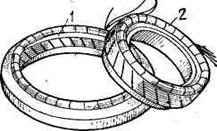
Рис.22 -. Статор и ротор многополюсных ВТ.
Многополюсные вращающиеся трансформаторы используются в двухканальных схемах синхронной связи для систем точного отсчета, а также в схемах с малым углом поворота. Они, как правило, выполняются плоскими — имеют малую длину и большой диаметр (рис.22),что позволяет увеличивать число полюсов. Обычно такие ВТ встраиваются непосредственно в прибор, поэтому не имеют подшипниковых щитов. Статор 1 и ротор 2 многополюсных ВТ таких ВТ располагаются непосредственно на поворачивающихся друг относительно друга частях механизма.
Погрешности вращающихся трансформаторов.
К ВТ предъявляются высокие требования в отношении точности воспроизведения заданной функциональной зависимости выходного напряжения от угла поворота ротора.
Все погрешности ВТ разделяются на систематические и случайные.
Систематические погрешности обусловлены принципом работы, конструкцией, неточностью изготовления и условиями эксплуатации ВТ. Эти погрешности проявляются в следующем:
1. погрешности, обусловленные принципом работы, в СКВТ проявляются в неточности симметрирования обмоток, а в ЛВТ—в отклонении зависимости U2=f(α) от линейной зависимости при значениях α<60°;
2. погрешности от конструктивных особенностей вызываются изменением магнитной проводимости зазора вследствие зубчатости статора и ротора, в нелинейности кривой намагничивания ВТ;
3. погрешности от неточности изготовления ВТ проявляются асимметрией магнитопровода, неточностью скоса пазов и др.;
4. погрешности, определяемые условиями эксплуатации ВТ, вызываются колебаниями частоты и напряжения в питающей сети, отклонениями температуры окружающей среды за допустимые пределы, предусмотренные ТУ, и т. п.
Случайные погрешности ВТ вызываются разбросом свойств применяемых материалов, нарушением технологического режима изготовления и другими случайными причинами.
Точность ВТ характеризуется следующими показателями:
1. Погрешностью воспроизведения синусоидальной зависимости напряжения от угла поворота (для СКВТ). Эту погрешность обычно измеряют максимальной ошибкой отклонения напряжения от заданной зависимости Uвых, %.
2. Погрешностью воспроизведения линейной зависимости (для ЛВТ), выраженной в угловых минутах или в процентах от Uвых.
3. Асимметрией нулевых точек, заключающейся в следующем. В сеть включают сначала одну обмотку статора, а затем другую, определяя каждый раз такое положение ротора, при котором напряжение на какой-либо его обмотке равно нулю. Теоретически при переключении напряжения с одной обмотки статора на другую угол поворота ротора должен быть равен 90°, но практически он несколько отличается от 90°. Отклонение фактического угла поворота ротора от 90° и определяет асимметрию нулевых точек в угловых минутах.
4. Величиной э. д. с. компенсационной обмотки, измеряемой в процентах от наибольшего значения э. д. с. обмотки ротора.
5. Величиной остаточной э. д. с. обмоток ротора, соответствующей наименьшей э. д. с. на выходе ВТ. Эти э. д. с. обусловлены наличием паразитных (емкостных и магнитных) связей между обмотками ВТ. Остаточная э. д. с. измеряется в процентах от наибольшего значения э. д. с. обмотки ротора и находится в пределах от 0,003 до 0,1%.
В зависимости от допускаемых погрешностей ВТ подразделяются на четыре класса точности: 0, 1, 2 и 3. Значения основных показателей погрешностей для этих классов приведены в табл. 11.1.
|
Показатель погрешности |
Класс |
точности |
|||
|
0 |
1 |
2 |
3 |
||
|
сквт |
Максимальная ошибка, % |
±0,05 |
±0,1 |
±0,2 |
±0,3 |
|
Асимметрия нулевых точек, у гл. мин |
±2 |
±3,5 |
±6 |
±8 |
|
|
Максимальное значение э. д. с. в компенсационной обмотке, % |
0,4 |
0,6 |
0,9 |
1,5 |
|
|
лвт |
Максимальная ошибка, % |
— |
±0,1 |
±0,2 |
±0,3 |
|
Асимметрия, угл. ;:рад |
— |
±3,5 |
±6 |
±8 |
Асинхронные тахогенераторы.
Тахогенераторами называются небольшие электрические машины, предназначенные для преобразования механического перемещения – вращения вала – в электрический сигнал – выходное напряжение.
Основные требования предъявляемые к ним
– линейность выходной характеристики – пропорциональность выходного напряжения Uг частоте вращения n.
- бол. крутизна выходной характеристики
- макс. Вых. Р при мин. Потребл. Р
- мин. Пульсация выходного напряжения Uг
- мин. Изменения фазы выходного напряжения Uг
- малый момент инерции ротора и малая величина момента сопротивления
- стабильность выходной характеристики
- малые габариты и масса
![]()
![]()
![]()
![]()
![]()
![]() В
отличие от тахогенераторов постоянного тока асинхронные тахогенераторы являются
бесконтактными (не имеют скользящих контактов), а следовательно, они более
надежны.
В
отличие от тахогенераторов постоянного тока асинхронные тахогенераторы являются
бесконтактными (не имеют скользящих контактов), а следовательно, они более
надежны.
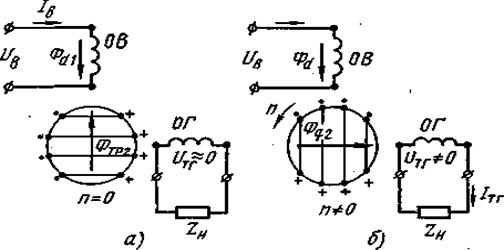
Рис.9 - Принцип действия асинхронного тахогенератора
По конструкции асинхронные тахогенераторы не отличаются от асинхронных исполнительных двигателей с полым немагнитным ротором. На их статоре так же расположены две обмотки, сдвинутые в пространстве на 90 эл. град (рис.9): одна из обмоток ОВ подключена к сети и называется обмоткой возбуждения; с другой обмотки ОГ, называемой выходной или генераторной, снимается выходное напряжение тахогенератора.
Принцип действия асинхронного тахогенератора состоит в следующем. Переменный ток возбуждения создает пульсирующий поток Фd1, который, пронизывая полый ротор, наводит в нем э. д. с. трансформации. Контуры токов ротора от э. д. с. трансформации располагаются в плоскостях, перпендикулярных потоку возбуждения (рис.9,а). Они создают поток ротора Фтр2, который направлен навстречу потоку возбуждения и компенсируется возрастающим током обмотки возбуждения.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.